📝 基本概念
- 进程:程序是指编译过的、可执行的二进制代码。进程指正在运行的程序。进程包括二进制镜像,加载到内存中,还涉及很多其他方面:虚拟内存实例、内核资源如打开的文件、安全上下文如关联的用户,以及一个或多个线程。
- 线程:线程是进程内的活动单元,每个线程包含自己的虚拟存储器,包括栈、进程状态如寄存器,以及指令指针。在单线程进程中,进程即线程,一个进程只有一个虚拟内存实例,一个虚拟处理器。在多线程的进程中,一个进程有多个线程,由于虚拟内存是和进程关联的,所有线程会共享相同的内存地址空间
- 协程:协程可以理解为一种轻量级线程,与线程相比,协程不受操作系统调度。协程调度器完全由用户应用程序提供,协程调度器按照调度策略把协程调度到线程中运行。
提示
goroutine、线程、进程到底怎么区分
很多场景下,面试官并不是要你背定义,而是想确认你是否知道三者的调度者、资源成本和隔离级别。
| 维度 | 进程 | 线程 | goroutine |
|---|---|---|---|
| 调度主体 | 操作系统 | 操作系统 | Go 运行时调度器 |
| 地址空间 | 独立 | 共享所属进程地址空间 | 共享所属进程地址空间 |
| 创建/切换成本 | 高 | 中 | 低 |
| 初始栈 | 通常较大 | 通常较大 | 很小,按需增长 |
| 通信方式 | IPC | 共享内存、锁 | channel、共享内存、锁 |
| 典型数量级 | 少 | 中 | 可非常多 |
可以这样理解:
- 进程强调资源隔离,稳定但重
- 线程强调同进程内并发执行,切换比进程轻
- goroutine 是 Go 在用户态进一步做的抽象,核心目标是让开发者以更低成本启动海量并发任务
goroutine 不是“Go 版线程”,它更接近“由 Go runtime 托管的轻量任务”。它最终仍然要映射到操作系统线程上运行,只是中间多了一层 Go 自己的调度。
🔄 并发与并行
很多开发者对于并发和并行的概念还比较模糊,其实只需要根据一点来判断即可:能不能同时运行。
- 并行:两个任务能同时运行就是并行
- 并发:不能同时运行,而是每个任务执行一小段,交叉执行,这种模式就是并发

并行(Parallelism):两个任务一直运行,切实同时运行着。要注意并行的话一定要有多个 CPU 核心的支持,因为只有一个 CPU 的话,同一时间只能跑一个任务。

并发(Concurrency):两个任务,每次只执行一小段,这样交叉的执行,就是并发模式。并发模式在单核 CPU 上是可以完成的。
🔒 互斥锁与读写锁
🔐 互斥锁sync.Mutex
互斥锁保证同一时间只有一个 goroutine 能进入临界区,适合写多读少的场景。
|
|
注意事项:
- 避免重复加锁而不解锁
- 锁未释放前不能再次访问需要该锁的代码(mutex 是不可重入锁,自己加锁后没有释放锁,继续加锁,就死锁了)
- 避免对未锁定的互斥锁解锁(会导致 panic)
- goroutine 被加锁后需要及时解锁否则其他 goroutine 无法拿到锁
- 如果要保证两个协程同一个锁,那么应该传递指针,不要拷贝 mutex
⚙️ Mutex 底层实现
Go 里的 sync.Mutex 并不是只有“一把锁”这么简单,它底层实际上是 原子操作 + 信号量 的组合:
|
|
state:记录锁当前处于什么状态,比如是否已加锁、是否有 goroutine 被唤醒、是否进入饥饿模式,以及等待者数量等。sema:对应运行时里的信号量,用来把抢不到锁的 goroutine 挂起,并在合适的时候唤醒。
state 的位语义可以用下面这张图理解:

而阻塞和唤醒这条链路,最终会落到 sema 这类运行时信号量机制上:

从实现思路上看可以概括成一句话:先用 CAS 抢锁,抢不到再决定是短暂自旋,还是进入信号量等待队列休眠。
🗂️ 从版本演进看 Mutex
如果按 runtime 的演进去理解,sync.Mutex 可以粗略看成“原子抢锁 + 自旋 + 信号量阻塞/唤醒”的混合模型一直在持续优化。
- 常见资料会把 Go 1.18 前后作为一个比较明显的分界点来看:后续版本对饥饿模式和公平性交接的行为描述更明确。
- 一个很关键的阈值是等待时间接近
1ms时,运行时会更倾向于从“优先吞吐”切到“优先公平”的处理方式。 - 一旦进入更强公平性的路径,新来的 goroutine 就不再适合继续插队竞争,而是更倾向于排队等待,由解锁方把锁尽快交到等待最久的 goroutine 手里。
不用死记某个小版本的实现细节,真正该记住的是:Go 的 Mutex 不是单一策略,而是在吞吐、自旋成本和公平性之间动态折中。
⚖️ 悲观锁与乐观锁
从锁设计思想看,sync.Mutex 属于典型的悲观锁。
- 悲观锁:默认先假设冲突会发生,所以访问共享资源前先上锁。
- 乐观锁:默认先假设冲突不常发生,先直接操作,提交时再检查是否冲突,典型手段是 CAS 重试。
所以可以这样区分:
Mutex更适合冲突频繁、临界区明确的场景。- 原子操作和 CAS 更接近乐观锁思路,适合单变量、低冲突、追求性能的场景。
🌀 Mutex 的两种模式
Mutex 主要有两种运行模式:
- 正常模式(Normal Mode):新来的 goroutine 可以和等待队列头部的 goroutine 竞争锁,追求更高吞吐量。
- 饥饿模式(Starvation Mode):如果某个等待者长期拿不到锁,Mutex 会切到更公平的模式,直接把锁移交给等待队列头部。
这两种模式会动态切换。你可以把它理解成:平时优先性能,等有人等太久了再优先公平。
📌 自旋与公平性
在正常模式下,抢锁失败的 goroutine 不一定立刻睡眠,它可能会先自旋几次。这样做不是浪费 CPU,而是在赌“锁马上就释放”,用一次很短的忙等,换掉一次昂贵的挂起与唤醒。
不过自旋并不是无限制发生的,运行时会结合 CPU 核数、当前是否繁忙、是否值得继续争抢等条件来决定。也正因为有这套机制:
- 正常模式下,刚来的 goroutine 可能“插队”抢到锁,吞吐更高,但不完全公平。
- 饥饿模式下,锁会直接交给等待最久的 goroutine,更公平,但吞吐量会下降一点。
💀 死锁
提到锁,就有一个绕不开的话题:死锁。死锁就是一种状态,当两个或以上的 goroutine 在执行过程中,因争夺共享资源处在互相等待的状态,如果没有外部干涉将会一直处于这种阻塞状态。
🚨 死锁场景一:Lock/Unlock 不成对
最常见的场景就是对锁进行拷贝使用:
|
|
运行结果:
|
|
如果将带有锁结构的变量赋值给其他变量,锁的状态会复制。复制后的新锁拥有了原来的锁状态,那么在 copyMutex 函数内执行 mu.Lock() 的时候会一直阻塞,因为外层的 main 函数已经 Lock() 了一次,但是并没有机会 Unlock(),导致内层函数会一直等待 Lock(),而外层函数一直等待 Unlock(),这样就造成了死锁。
🔁 死锁场景二:循环等待
A 等 B,B 等 C,C 等 A,循环等待:
|
|
运行结果:
|
|
两个 goroutine,一个先锁 mu1,再锁 mu2,另一个先锁 mu2,再锁 mu1,但是它们进行第二次加锁操作的时候,彼此等待对方释放锁,这样就造成了循环等待,一直阻塞,形成死锁。
避免死锁的建议:
- 尽量避免锁拷贝,并且保证 Lock() 和 Unlock() 成对出现
- 尽量养成如下使用习惯:
|
|
📖 读写锁sync.RWMutex
读写锁指读操作和写操作分开,可以分别对读操作和写操作进行加锁,一般用在大量读操作、少量写操作的情况。
|
|
读写锁的使用原则:
- 同时只有一个 goroutine 能够获得写锁
- 同时可以有任意多个 goroutine 获得读锁
- 同时只能存在写锁定和读锁定(读和写互斥)
通俗理解就是可以多个 goroutine 同时读,但是只有一个 goroutine 能写,共享资源要么在被一个或多个 goroutine 读取,要么在被一个 goroutine 写入,读写不能同时进行。
🏆 RWMutex 底层思路
RWMutex 的底层并不是两套完全独立的锁,而是建立在互斥锁基础上的扩展协调机制。常见理解方式是:
- 复用
Mutex作为写锁的基础能力。 - 用
readerCount记录当前读者数量。 - 用
readerWait记录写锁到来后,还需要等待多少读者退出。
可以把它理解成这样:
- 读锁获取:如果当前没有写锁占用,就增加读者计数,允许多个读者并发进入。
- 写锁获取:先阻止新的读者继续进入,再等待已有读者全部退出,随后独占资源。
- 锁释放:读锁释放时递减读者计数;写锁释放时恢复读路径,让后续读者或写者继续竞争。
这也是为什么 RWMutex 适合“读多写少”的根本原因:它不是让读写都更快,而是让“多个读操作能同时成立”。
🧭 除了 Mutex 还能怎么安全读写共享变量
锁不是唯一方案。实际工程里,常见选择还有这些:
channel:通过传递数据所有权来避免直接竞争,更适合流程编排和协程间协作。sync/atomic:适合计数器、状态位、指针切换这类简单共享状态,性能通常最好。- 信号量类控制:本质上更偏“限制并发数”或“协调资源配额”,适合连接池、任务池之类的场景。
怎么选取决于你要保护的到底是什么:
- 如果要保护一段复杂逻辑或多个变量一致性,用锁。
- 如果只是改单个标志位或计数器,用原子操作。
- 如果更希望通过消息传递来解耦协作流程,用
channel。
⏳ 等待组sync.WaitGroup
在 Go 语言并发编程中,经常需要等待多个 goroutine 执行完成。sync.WaitGroup 就是用于等待一组 goroutine 完成任务的同步原语。
sync.WaitGroup 是一个结构体,内部维护着一个计数器,通过三个方法配合使用:
| 方法 | 作用 |
|---|---|
Add(delta int) |
计数器增加 delta |
Done() |
计数器减 1,等价于 Add(-1) |
Wait() |
阻塞当前协程,直到计数器归零 |
🏅 基本使用
|
|
运行结果:
|
|
注意:sync.WaitGroup 的计数器不能为负数,否则会 panic。
🧱 WaitGroup 底层结构
WaitGroup 的核心并不是“轮询等待”,而是 原子计数器 + 信号量唤醒:
|
|
noCopy:给go vet这类工具用的,提醒开发者WaitGroup不能在使用后被复制。state:64 位状态值,高 32 位通常记录任务计数器,低 32 位记录等待中的 goroutine 数量。sema:当Wait()需要阻塞时,运行时会借助它把当前 goroutine 挂起;等计数归零后,再统一唤醒等待者。
所以它的运行逻辑可以概括为:
Add()增减任务计数。Done()本质上就是Add(-1)。Wait()发现计数还没归零,就进入等待。- 最后一个
Done()把计数减到零时,负责唤醒所有正在Wait()的 goroutine。
⚠️ WaitGroup 使用陷阱
除了“计数器不能减成负数”之外,WaitGroup 还有两个特别常见的坑:
- 循环里直接捕获循环变量:这不是
WaitGroup独有的问题,但它经常和wg.Add/Done/Wait一起出现,最终表现成输出值不对或者并发任务逻辑错乱。 - 一定要先
Add再启动 goroutine:如果 goroutine 先跑起来,而主协程还没来得及把计数加上,Wait()就可能先看到计数是0,从而提前返回,造成竞态。
稳妥写法通常就是:
|
|
另外,Done() 最好总是配合 defer 使用,这样即便中间出现提前返回,也不容易把计数漏掉。
⏱️ 一次执行sync.Once
sync.Once 保证某个操作只会执行一次,并且是并发安全的。无论有多少个 goroutine 同时调用它,都不会重复执行。
常用于单例模式、配置文件加载等只需要执行一次的场景。
|
|
核心方法:
|
|
f:要执行的函数- 多个 goroutine 并发调用
Do时,只有第一次调用会执行f,后面的调用会直接跳过 - 保证了并发安全(内部用了互斥锁和标志位)
注意事项:
Do里传入的函数必须是幂等的(即多次调用不会出错)- 不能在
Do的函数里再次调用同一个once.Do(会死锁) - 不能直接复制
sync.Once,应始终用指针或包级变量
🔍 sync.Once 底层原理
sync.Once 的核心结构非常简单,本质上是一个“是否执行过”的标志位配合一把锁:
|
|
它的实现思路是“快路径原子读,慢路径加锁双检”:
- 先通过原子读取检查
done是否已经是1。 - 如果已经执行过,直接返回,这条路径完全无锁。
- 如果还没执行过,就进入慢路径加锁。
- 加锁后再检查一次
done,防止多个 goroutine 同时闯入。 - 只有真正第一个拿到执行资格的 goroutine 才会运行传入函数,并在完成后把
done原子写成1。
这也是为什么 sync.Once 同时兼顾了正确性和性能:已经初始化完成后的大多数调用,成本非常低。
🔀 sync.Once 与 init() 的区别
有时候我们使用 init() 方法进行初始化。init() 方法是在其所在的 package 首次加载时执行的,而 sync.Once 可以在代码的任意位置初始化和调用,是在第一次用到它的时候才会初始化。
sync.Once 最大的作用就是延迟初始化。设想一下,如果是在程序刚开始就加载配置,若迟迟未被使用,则既浪费了内存,又延长了程序加载时间,而 sync.Once 就刚好解决了这个问题。
🔔 条件变量sync.Cond
sync.Cond 是 Go 里的条件变量,用来在多个 goroutine 之间进行等待和通知。它本身不控制互斥,而是依赖于一个锁(sync.Mutex 或 sync.RWMutex)来保护共享状态。
简单来说:
当某个条件不满足时,goroutine 可以等待; 当另一个 goroutine 改变了条件并发出信号,等待的 goroutine 才会继续执行。
🔧 创建条件变量
|
|
| 方法 | 作用 |
|---|---|
cond.Wait() |
等待条件成立,释放锁并阻塞,直到被 Signal() 或 Broadcast() 唤醒,然后会重新加锁返回 |
cond.Signal() |
唤醒一个正在等待的 goroutine |
cond.Broadcast() |
唤醒所有正在等待的 goroutine |
📋 生产者-消费者示例
|
|
注意事项:
- 必须配合锁使用:
Wait()调用前需要加锁,它会在内部自动释放锁并阻塞,唤醒后会重新加锁 - 要用循环检查条件:因为即使被唤醒,条件也可能依旧不满足(虚假唤醒)
⚡ 原子操作sync/atomic
所谓原子操作就是这一系列的操作在 CPU 上执行是一个不可分割的整体,显然要么全部执行,要么全部不执行,不会受到其他操作的影响,也就不会存在并发问题。
- 提供无锁的原子操作,比如原子加减、交换、比较并交换(CAS)
- 适合需要高性能并发计数、标志位控制的场景
从底层看,Go 的 sync/atomic 并不是靠“大锁”来模拟原子性,而是依赖 CPU 硬件提供的原子指令。也就是说,像 atomic.AddInt64 这类操作,在不同平台上最终会被编译成对应的原子机器指令,由硬件来保证“这一步不可分割”。
更具体一点说,底层常见依赖的是 CAS(Compare-And-Swap)、LL/SC(Load-Linked/Store-Conditional) 这类硬件原子指令。sync/atomic 只是把这些平台相关细节封装成了统一 API,让我们在 Go 层面直接使用。
🏗️ atomic 与 mutex 的区别
- 使用方式:通常 mutex 用于保护一段执行逻辑,而 atomic 主要是对变量进行操作
- 底层实现:mutex 由操作系统调度器实现,而 atomic 操作由底层硬件指令支持,保证在 CPU 上执行不中断。所以 atomic 的性能也能随 CPU 的个数增加线性提升
📜 常见方法
|
|
T 的类型是 int32、int64、uint32、uint64 和 uintptr 中的任意一种。
💻 示例
|
|
100 个 goroutine,每个 goroutine 都对 sum +1,最后结果为 100。
🎯 atomic.Value
上面展示的 AddT、StoreT 等方法都是针对基本数据类型做的操作。如果想对多个变量进行同步保护,例如对一个 struct 这样的复合类型用原子操作,Go 语言里的 atomic.Value 支持任意接口类型进行原子操作。
atomic.Value 提供了以下方法:
| 方法 | 作用 |
|---|---|
Load() |
从 Value 读出数据 |
Store(val any) |
向 Value 写入数据 |
Swap(new any) |
用 new 交换 Value 中存储的数据,返回原先的旧数据 |
CompareAndSwap(old, new any) |
比较 Value 中存储的数据和 old 是否相同,相同则替换为 new,返回 true |
|
|
运行结果:
|
|
🗺️ 并发安全映射 sync.Map
Go 语言内置的 Map 并不是并发安全的,在多个 goroutine 同时操作 map 的时候,会有并发问题。
🚨 普通 map 的并发问题
|
|
运行结果:
|
|
程序报错了,说明 map 不能同时被多个 goroutine 读写。
解决方案一:使用互斥锁保护 map
|
|
📋 sync.Map 的基本使用
Go 语言 sync 包提供了开箱即用的并发安全版 map——sync.Map,在 Go 1.9 引入。sync.Map 不用初始化就可以使用,内置了诸多操作方法:
| 方法 | 作用 |
|---|---|
Store(key, value) |
写入键值对 |
Load(key) |
读取值,返回 (value, ok) |
LoadOrStore(key, value) |
读取或写入,返回 (value, loaded) |
Delete(key) |
删除键值对 |
Range(f func(key, value) bool) |
遍历所有键值对 |
|
|
运行结果:
|
|
注意:
sync.Map没有提供获取 map 数量的方法,需要在遍历时自行计算sync.Map为了保证并发安全有一些性能损失,因此在非并发情况下,使用原生 map 相比使用 sync.Map 会有更好的性能
sync.Map 的核心特点
- 无锁读:大部分读操作直接命中
read,不需要加锁。 - 读写分离:
read负责热点读,dirty承接新写入和 read 未命中的数据。 - 延迟删除:key 在
read中时,多数删除是“标记删除”,不是立刻物理删除。 - 空间换时间:内部维护
read和dirty两张表,用更多空间换更少锁竞争。 - 自动提升:当
read连续未命中到一定程度后,dirty会提升成新的read。
🎪 sync.Map 适用场景
sync.Map 不是通用替代品,它更适合以下场景:
- 读多写少:大部分请求都能直接命中
read,这样无锁读的优势才能发挥出来。 - key 集合相对稳定:如果 key 频繁新增、删除、重建,
dirty和read之间的同步成本会变高。 - 更看重并发读性能:如果写操作很多,
sync.Map往往会越来越接近“互斥锁 + map”的效果,优势就不明显了。
🔬 sync.Map 核心原理
📊 数据结构
|
|
read:通过atomic.Value原子保存readOnly,大多数读请求都走这里。dirty:普通 map,写操作和 read 未命中后的补充读取会走这里,需要加锁。misses:记录从read未命中并回退到dirty的次数,用来判断是否该把dirty提升为新的read。
`entry.p`` 有三种状态:
- 指向真实 value:正常状态。
nil:逻辑删除状态,说明这个 key 被标记删除了。expunged:更彻底的删除标记,表示这个 key 只留在read中,不在dirty中。
sync.Map 的整体结构如下:
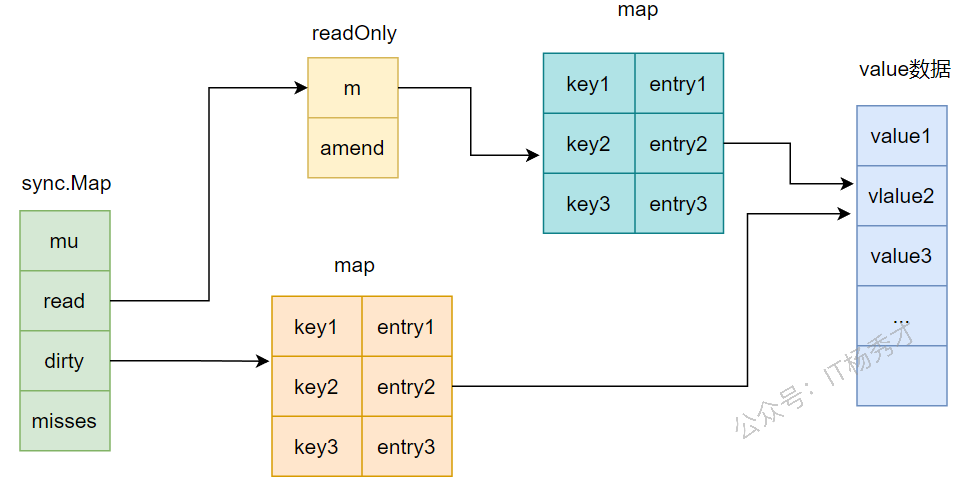
有一个很关键的点:read.m 和 dirty 这两张表里,相同 key 对应的 value 往往不是两份数据,而是同一个 entry 指针。因此改了 entry.p,两边看到的是同一份结果。
⬆️ dirty 提升
dirty 提升的目的,是把最近经常需要加锁访问的数据同步成新的只读视图,减少后续锁竞争。
触发时机可以简单记成一句话:read 老是读不到,misses 又越来越多,就该让 dirty 顶上来了。
|
|
提升后会发生三件事:
dirty直接成为新的read- 原来的
dirty被置为nil misses清零,等待下一轮统计
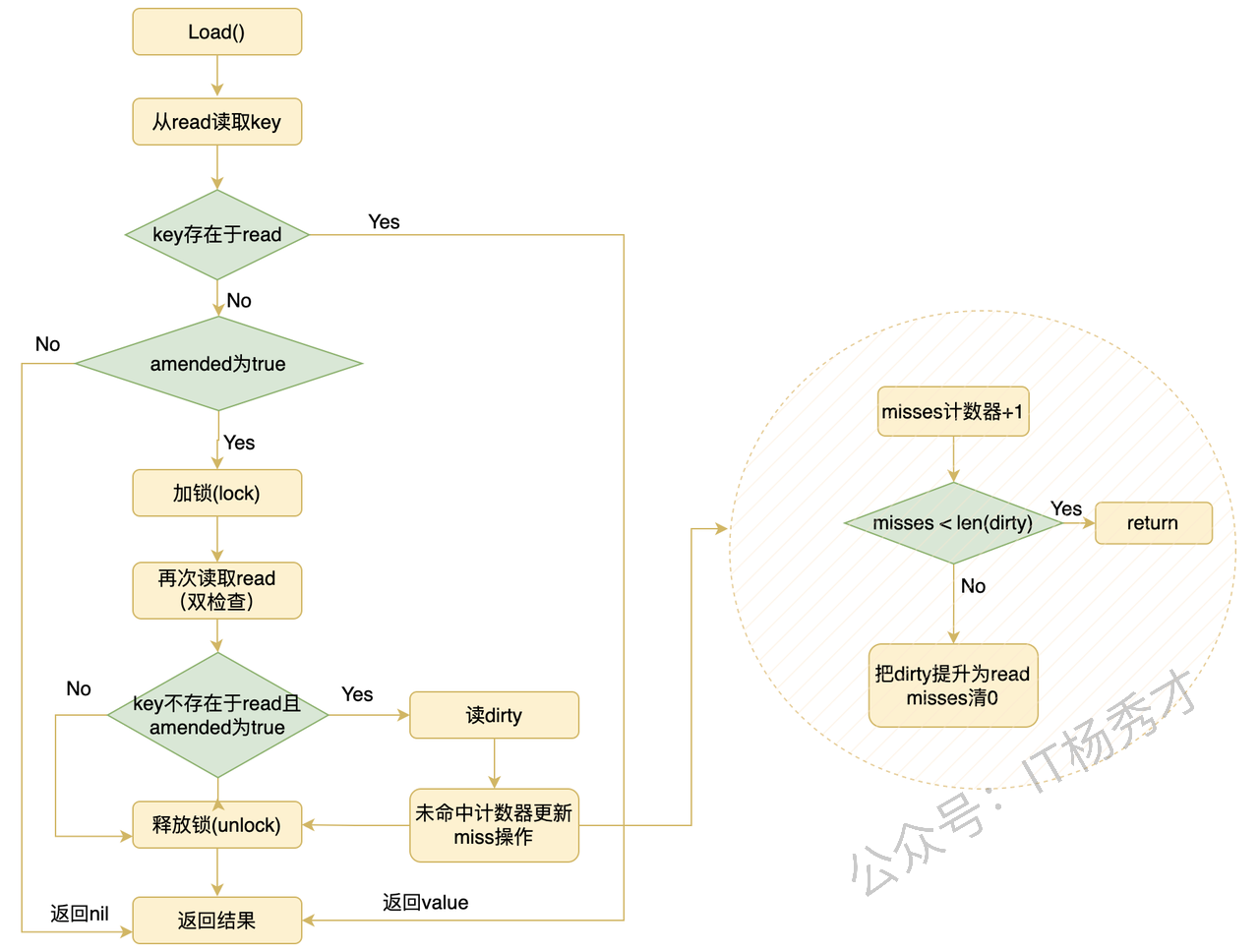
📥 读取流程
|
|
- 先从
read无锁读取。 - 如果
read没命中,并且amended=true,说明dirty里有 read 没有的数据,这时才加锁去dirty查。 - 只要走了
dirty,就会累计一次miss。 - 当
misses >= len(dirty)时,dirty会被提升成新的read。
读取流程图:
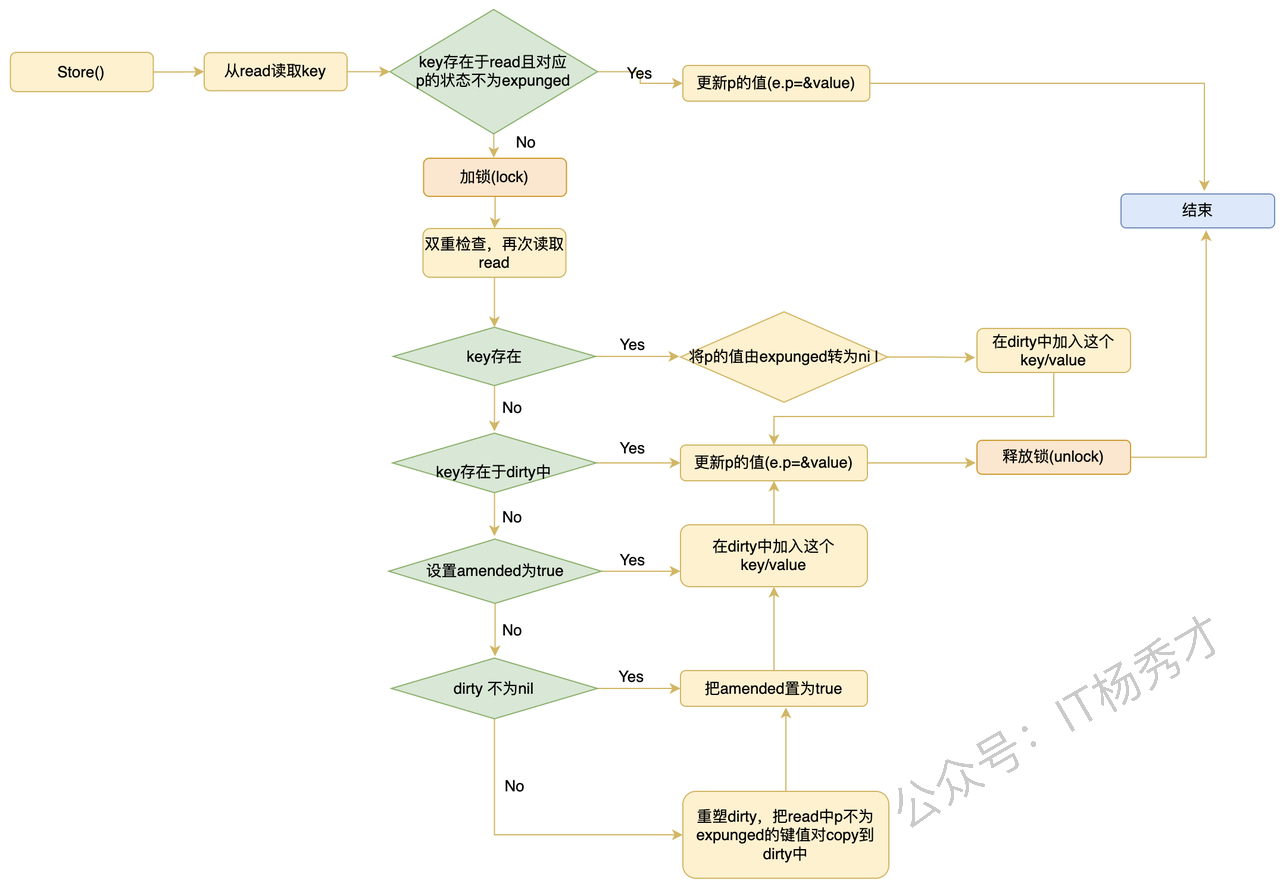
💾 存储流程
|
|
- 如果 key 已经存在于
read,且 entry 没被expunged,会优先尝试无锁更新。 - 如果 key 处于
expunged状态,就不能只改read,因为这说明 dirty 和 read 的 key 集已经分叉了,必须加锁把这个 key 重新并回 dirty。 - 如果 key 是全新的:
dirty == nil时,要先根据read重建 dirty;- 然后再把新 key 插入 dirty,并把
read.amended设为true。
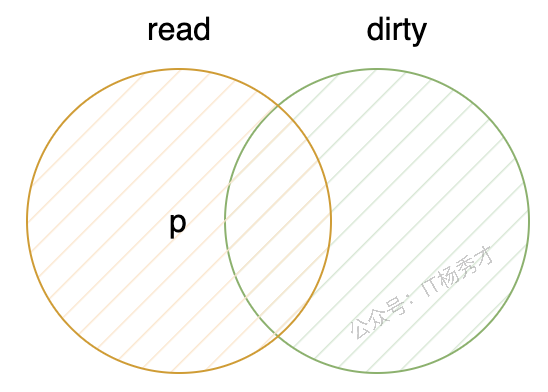
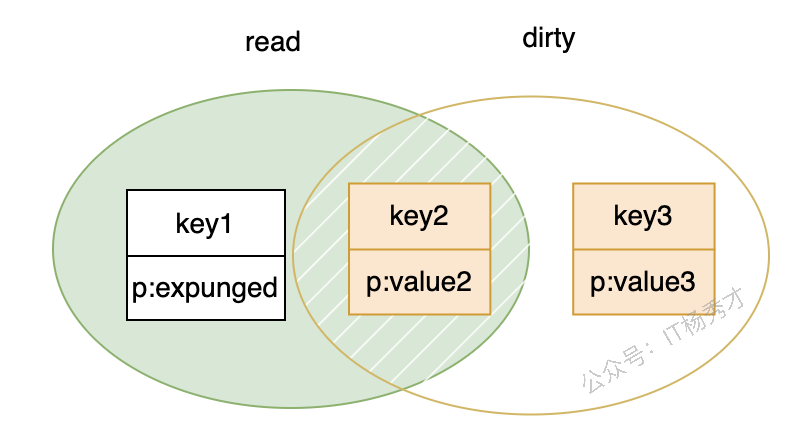
p == expunged 时的结构可以用下面这张图理解:
存储流程图:
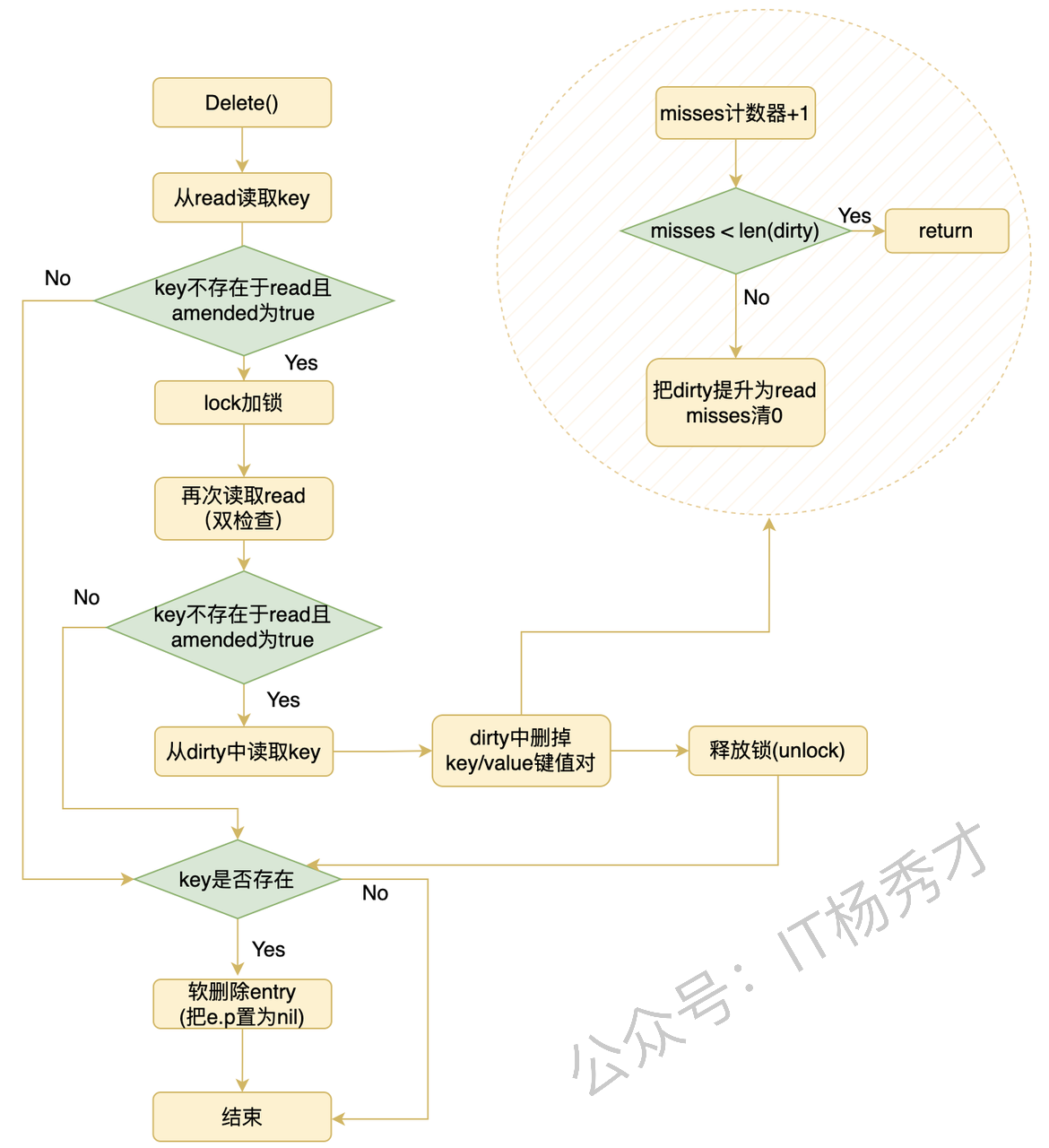
🗑️ 删除流程
|
|
- 如果 key 在
read中,删除通常是延迟删除:- 只是把
entry.p标成nil - 并没有立刻从 map 结构里把这个 key 移除
- 只是把
- 如果 key 不在
read中,而是在dirty中,才会直接delete(m.dirty, key)做物理删除。
所以可以把它记成:
- 从 read 删除:延迟删除
- 从 dirty 删除:直接删除
删除流程图:
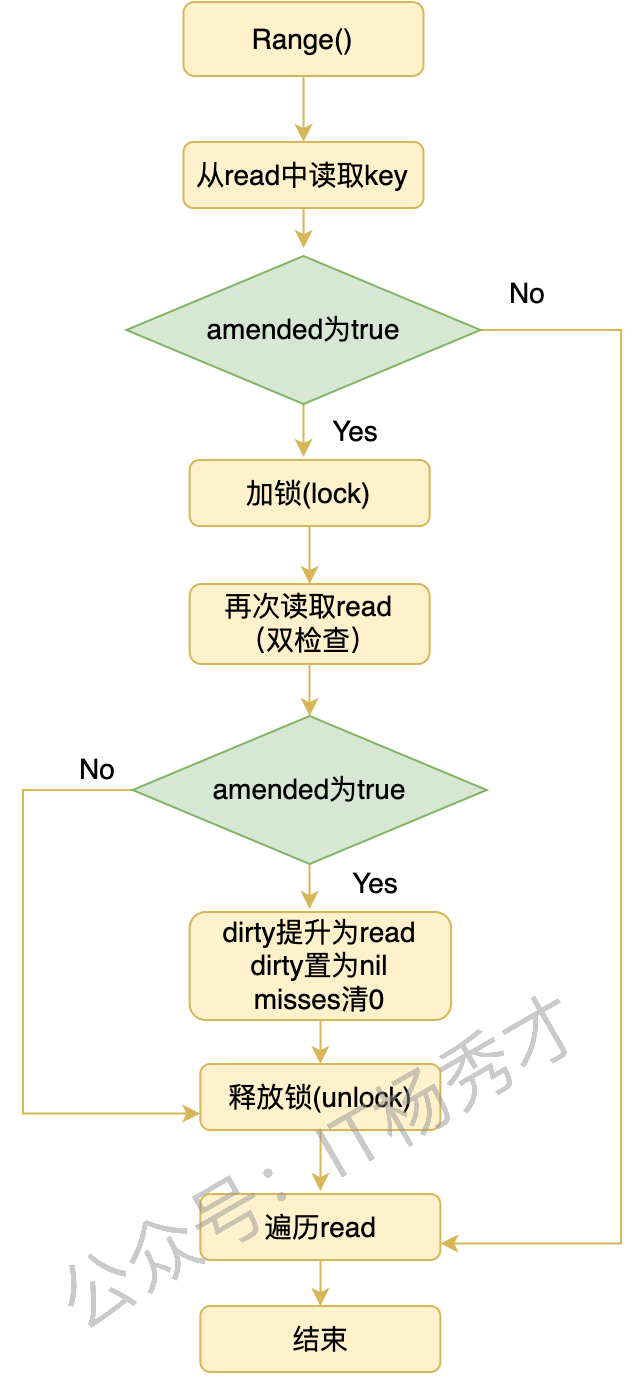
🔂 Range 流程
Range 的处理方式和前面几个方法不太一样。它的目标不是“尽量只看 read”,而是要确保遍历到 map 中所有当前有效的 key。
核心逻辑是:
- 如果
read.amended=false,说明dirty里没有 read 没有的数据,直接遍历read就够了。 - 如果
read.amended=true,说明dirty里有 read 里没有的新 key,这时会先把dirty提升成新的read,再遍历。
|
|
Range 流程图:
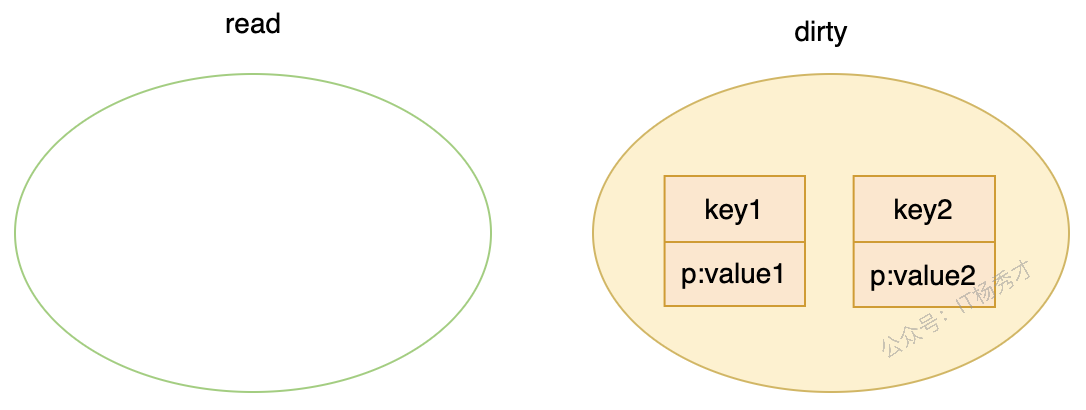
📑 p 的状态变化
sync.Map 里最容易讲清楚底层行为的地方,就是 entry.p 在 正常值 -> nil -> expunged -> 恢复 之间如何切换。
可以按一条具体链路来理解:
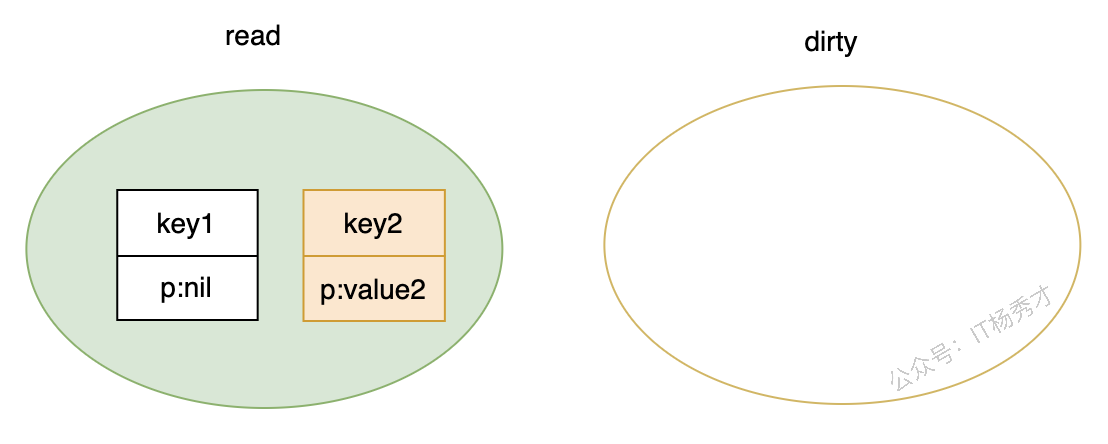
- 一开始向空的
sync.Map写入key1/value1和key2/value2,新数据先进入dirty。
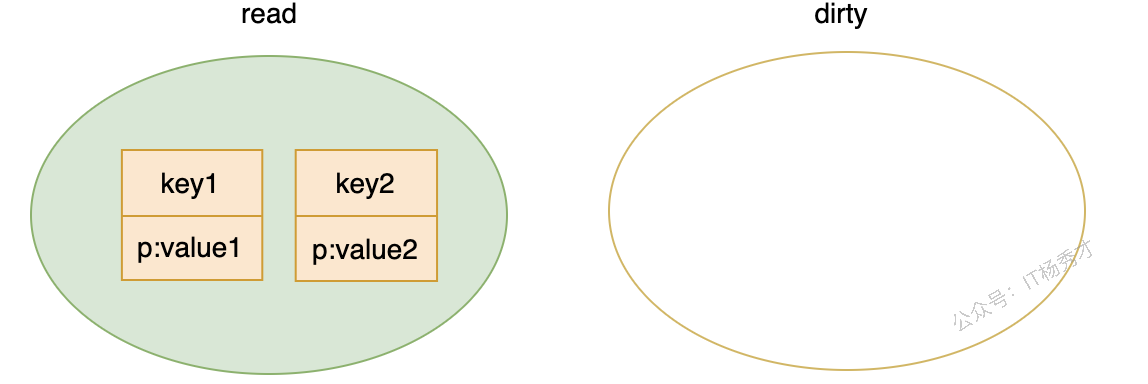
- 连续读取这些 key,
read多次未命中,misses达到阈值后,dirty提升为read,dirty=nil。
- 删除
key1后,因为它存在于read中,所以只是把key1对应的p标成nil,属于逻辑删除。
- 这时如果再插入
key3,由于dirty为空,运行时会基于read重建dirty。重建过程中,原来p=nil的key1会被进一步标为expunged,表示这个 key 只留在read中,不再进 dirty。
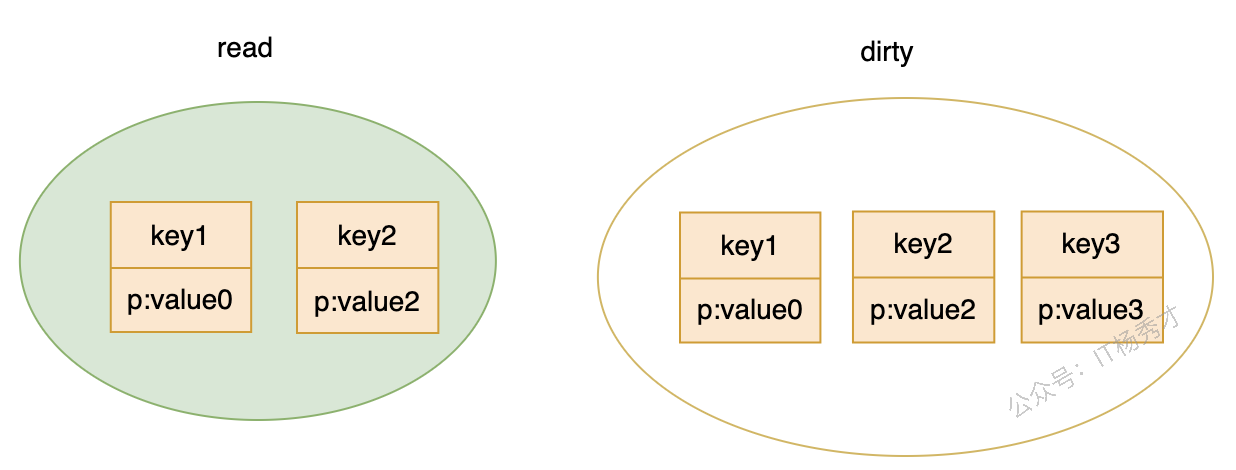
- 如果之后又重新
Store(key1, value0),发现它在read中但状态是expunged,就不能只操作read,而必须先把状态从expunged恢复,再重新加入dirty,最后更新值。
这套状态设计的核心目的,是把“是否需要加锁同步 dirty”区分得更细:
p == nil:可以理解为“逻辑删了,但 dirty 可能还跟得上”p == expunged:可以理解为“这个 key 已经和 dirty 脱钩了,再操作它必须带上 dirty 一起处理”
✅ sync.Map 总结
sync.Map的核心不是“简单地给 map 加一把大锁”,而是通过read + dirty两张表做读写分离。- 读路径优先无锁命中
read,这是它在读多写少场景里性能好的根本原因。 - 写路径主要落在
dirty,并在必要时重建或同步dirty。 - 删除分成延迟删除和直接删除两种,取决于 key 当前位于
read还是dirty。 entry.p的nil / expunged / 正常值三种状态,是理解sync.Map行为的关键。
上面这几点也解释了为什么 sync.Map 的推荐场景通常就是:读多写少、key 集合相对稳定;一旦写操作明显变多,它的收益就会迅速下降。
🏊 对象池sync.Pool
sync.Pool 是在 sync 包下的一个内存池组件,用来实现对象的复用,避免重复创建相同的对象,造成频繁的内存分配和 GC,以达到提升程序性能的目的。
虽然池子中的对象可以被复用,但是 sync.Pool 并不会永久保存这个对象,池子中的对象会在一定时间后被 GC 回收,这个时间是随机的。所以,用 sync.Pool 来持久化存储对象是不可取的。
另外,sync.Pool 本身是并发安全的,支持多个 goroutine 并发地往 sync.Pool 存取数据。
📚 基本使用方法
关于 sync.Pool 的使用,一般是通过三个方法来完成的:
| 方法 | 说明 |
|---|---|
New |
sync.Pool 的构造函数,用于指定 sync.Pool 中缓存的数据类型,当调用 Get 方法从对象池中获取对象的时候,对象池中如果没有,会调用 New 方法创建一个新的对象 |
Get |
从对象池取对象 |
Put |
往对象池放对象,下次 Get 的时候可以复用 |
|
|
运行结果:
|
|
第一次调用 pool.Get().(*Student) 时,由于池子内没有对象,所以会通过 New 方法创建一个。注意:pool.Get() 返回的是一个 interface{},所以我们需要断言成对应类型。使用完对象后,调用 Put 方法将对象放回池子内,可以看到两次取出的对象地址是同一个,说明 sync.Pool 有缓存对象的功能。
♻️ 对象复用注意事项
如果取出对象后进行修改,需要在放回池子之前进行 Reset 操作,将对象值复原:
|
|
🎯 使用场景
-
降低 GC 压力:
sync.Pool主要是通过对象复用来降低 GC 带来的性能损耗,所以在高并发场景下,由于每个 goroutine 都可能过于频繁地创建一些大对象,造成 GC 压力很大。所以在高并发业务场景下出现 GC 问题时,可以使用sync.Pool减少 GC 负担 -
不适合存储带状态的对象:比如 socket 连接、数据库连接等,因为里面的对象随时可能会被 GC 回收释放掉
-
不适合需要控制缓存对象个数的场景:因为 Pool 池里面的对象个数是随机变化的,池子里的对象是会被 GC 的,且释放时机是随机的