🧠 Map的定义
Map 是一种无序的键值对的集合。Map 最重要的作用是通过 key 来快速检索数据,key 类似于索引,指向数据的值。Map 是一种集合,所以我们可以像迭代数组和切片那样迭代它。不过,Map 是无序的,遍历 Map 时返回的键值对的顺序是不确定的。在获取 Map 的值时,如果键不存在,返回该类型的零值
特点
- 非并发安全,如果在不同 goroutine 并发读写同一个 map,会导致竞态问题甚至崩溃(运行时检测会 panic)并发读写需要并发安全的映射,可以加锁(使用
sync.Mutex)或者使用 Go 的并发安全容器(如sync.Map)。 - 迭代顺序是随机的,不保证顺序
- 键必须是可比较的类型
提示
💡 Map 的键类型有什么限制?
Go 语言中,map 的键必须是可比较的类型(comparable)。
可比较类型:
- 基本类型:
int、float、string、bool - 指针、
channel、interface - 结构体(如果所有字段都可比较)
- 数组(如果元素类型可比较)
不可比较类型:
slice、map、func
为什么有这个限制?
- map 的底层实现是哈希表,需要通过
==比较键是否相等 - 如果键不可比较,就无法判断两个键是否相同
示例:
|
|
📐 基本操作
📝 声明和初始化
-
声明映射:
var m map[string]int -
分配内存空间(初始化):
make(map[KeyType]ValueType, initialCapacity)- map 的零值是 nil,不能直接赋值元素,必须用
make初始化
- map 的零值是 nil,不能直接赋值元素,必须用
-
使用字面量创建Map
1 2 3 4 5 6// 使用字面量创建 Map m := map[string]int{ "apple": 1, "banana": 2, "orange": 3, }
提示
💡 map 的容量可以指定吗?
可以,使用 make 时指定初始容量可以减少扩容次数,提高性能。
|
|
建议:
- 如果知道大概的元素数量,建议指定容量
- 避免频繁扩容带来的性能开销
提示
💡 Map 的性能优化建议
-
预分配容量
- 如果知道大概的元素数量,使用
make(map[K]V, hint)预分配 - 避免频繁扩容带来的性能开销
- 如果知道大概的元素数量,使用
-
避免大 value 类型
- map 的 value 存储在桶中,大 value 会增加内存占用
- 考虑使用指针类型:
map[K]*V
-
合理使用 delete
- 删除元素不会缩容,如果大量删除后内存占用高,考虑重建 map
-
并发场景选择合适的方案
- 读多写少:使用
sync.Map - 写多读少:使用
map + sync.RWMutex
- 读多写少:使用
性能对比示例:
|
|
🔍 获取和修改元素
-
获取元素(通过键来获取值)
1 2v1 := m["apple"] v2, ok := m["pear"] // 如果键不存在,ok 的值为 false,v2 的值为该类型的零值 -
修改/插入元素:
m["apple"] = 5 -
获取长度:
func len(var map) int
提示
💡 如何判断 map 中是否存在某个 key?
使用双返回值的方式:
|
|
提示
💡 为什么不能对 map 元素直接取地址?
不能直接对 map 中的元素取地址,例如下面的写法会直接编译失败:
|
|
典型报错如下:
|
|
核心原因不是语法限制本身,而是 map 在扩容或迁移时,元素所在位置可能发生变化。如果语言允许你长期持有 m[key] 的地址,那么一旦底层桶搬迁,这个地址就可能失效。因此 Go 直接从语义层面禁止了这种写法。
如果确实需要“可修改且可持有地址”的值,常见做法是把 value 设计成指针:
|
|
🔁 遍历map
使用range循环来遍历map,返回键k和值v
|
|
- Go 中遍历 map 的顺序是不确定的,每次运行可能会不同。
🗺️ 嵌套Map
Map 的值可以是另一个 Map,这样就形成了嵌套结构:
|
|
运行结果:
|
|
📤 Map作为函数参数
Map 是引用类型,作为函数参数时传递的是底层指针的拷贝:
|
|
提示
💡 为什么 Go map 的遍历顺序是随机的?
1. 设计原因
- 避免依赖顺序:防止开发者依赖遍历顺序,提高代码可移植性
- 哈希表的天然特性:哈希表本身就是无序的
- 安全性考虑:避免攻击者利用顺序性进行攻击
2. 实现原理
Go 在遍历 map 时会:
- 随机选择一个起始桶
- 随机选择桶内的起始位置
- 每次遍历的顺序都可能不同
代码示例:
|
|
输出示例:
|
|
3. 如果需要有序遍历怎么办?
先将 key 排序,再按顺序遍历:
|
|
如果继续追问一个高频细节,可以这样理解:
- 遍历顺序始终不可靠
- 同一个协程里边遍历边删除是允许的
- 多个 goroutine 同时边遍历边删是不安全的
例如在单个协程里这样写,语法和运行时都是允许的:
|
|
但要注意,允许不代表结果顺序可预测。被删除的 key 可能已经被当前轮遍历拿到了,也可能还没来得及遍历到,因此最终看到的遍历结果并不稳定。
🗑️ 删除元素
func delete(m map[Type]Type, key Type):从 map 中删除键值对- 删除不存在的键:不会报错
- nil map 上使用
delete:不会panic只是无效操作 - 删除 key 操作只是将对应的 key-value 对标记为空,但不会释放桶(不会释放内存),也不会触发缩容
提示
💡 删除 map 中的元素会缩容吗?
不会缩容。删除元素只是标记为空,不会释放桶的内存,也不会触发缩容。
原因:
- 缩容需要重新分配内存和迁移数据,成本较高
- 删除操作频繁时,缩容会导致性能下降
- 如果需要释放内存,只能创建新的 map 并复制需要的元素
提示
单协程里边遍历边 delete 是允许的,但如果在多个 goroutine 中同时读写、遍历、删除同一个普通 map,运行时可能直接报:
fatal error: concurrent map read and map write
⚠️ 踩坑实录
💥 直接操作nil map,发生panic
问题:直接操作未初始化的map,会触发panic
|
|
解决方法:使用map前,需对map进行初始化。
|
|
🔢 float 类型作为 key 的问题
问题:float 类型可以作为 map 的 key 吗?
回答:
可以,但不推荐。
原因:
- float 类型存在精度问题,
NaN不等于自身 - 计算哈希时可能出现不稳定的结果
- 可能导致查找失败
示例:
|
|
📋 map 的 value 为切片的问题
问题:map 的 value 可以是切片吗?
回答:
可以,但需要注意初始化。
示例:
|
|
⚡ 并发读写 map 导致 panic
问题:并发读写 map 会导致什么问题?
回答:
Go map 不是并发安全的。并发读写会导致 panic: concurrent map read and map write 或 panic: concurrent map writes。
原因:
- Go runtime 会检测并发访问,发现冲突时直接 panic
- 这是一种快速失败(fail-fast)机制,避免数据竞争导致的不确定行为
解决方案:
|
|
🔬 底层原理
🪣 数据结构与内存布局
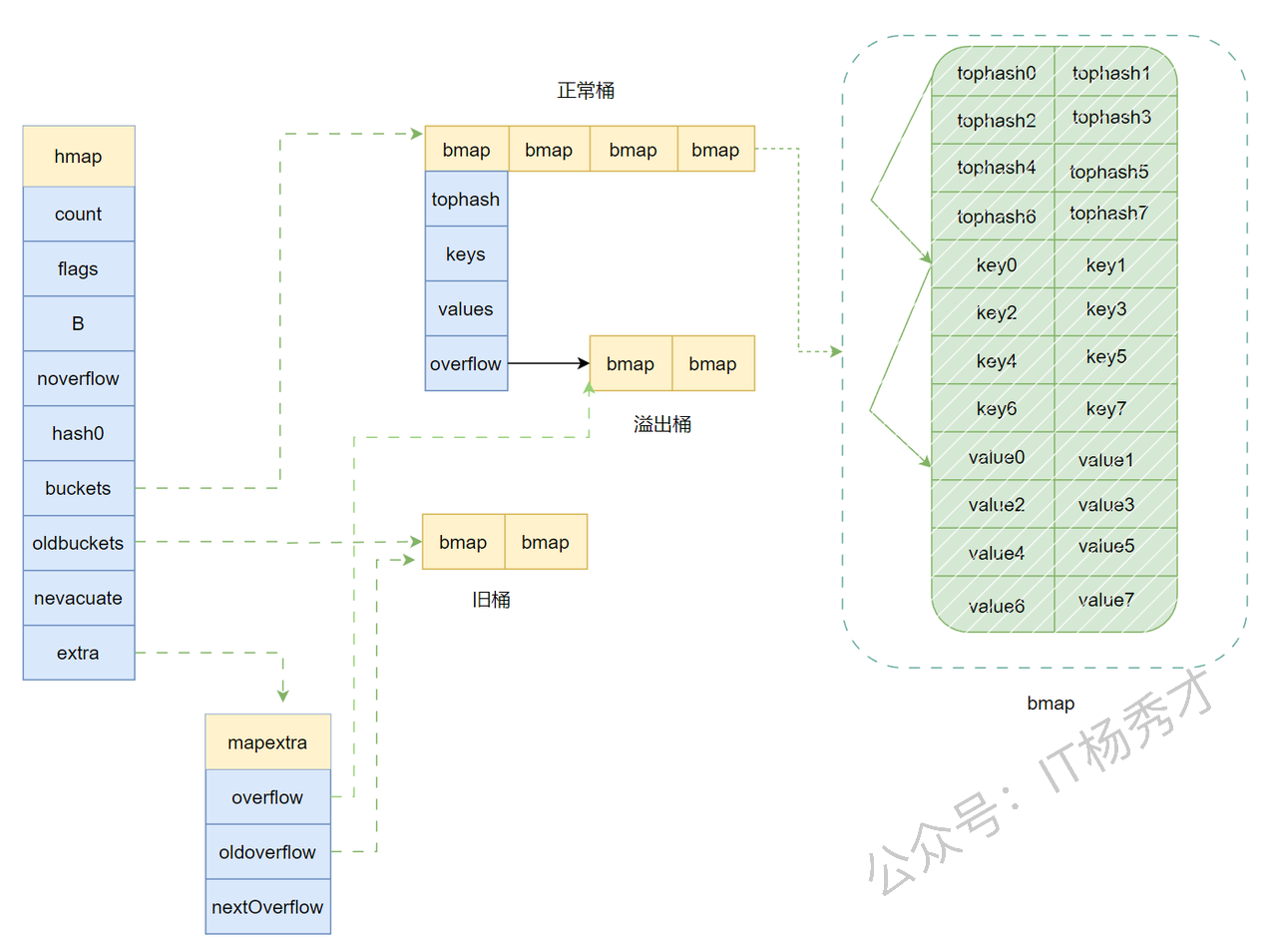
在 Go 语言中,map 类型的底层实现就是哈希表,map 类型的变量 本质上是一个指针 *hmap ,指向 hmap 结构体。
- Go map 的底层是一个
buckets数组 - 数组的每个元素都是一个桶(bucket)
- 每个桶可以存储 8 个 kv,当桶满时,会创建溢出桶
换句话说,map 变量本身更像是“哈希表控制器”,真正的数据是放在桶数组和溢出桶链上的。hmap 负责记录整张表当前有多少元素、桶数组在哪里、是否正处于扩容阶段,以及旧桶迁移到了哪里。
|
|
Go 使用桶(bucket)存储 kv 信息,对应的数据结构是 bmap
|
|
这里再补一句题库里很常见、但面试时经常被漏掉的点:为了减少内存碎片和对齐浪费,Go 的桶内布局并不是 key/value 交替存储,而是先放 8 个 key,再放 8 个 value。

提示
为什么设置为8个k-v键值对
8 个键值对的大小正好接近 CPU 的缓存行大小(通常是 64 字节),可以一次将整个桶加载到 CPU 缓存中,减少了 CPU 缓存未命中的概率,提升了访问性能
提示
💡 Go map 的底层实现原理
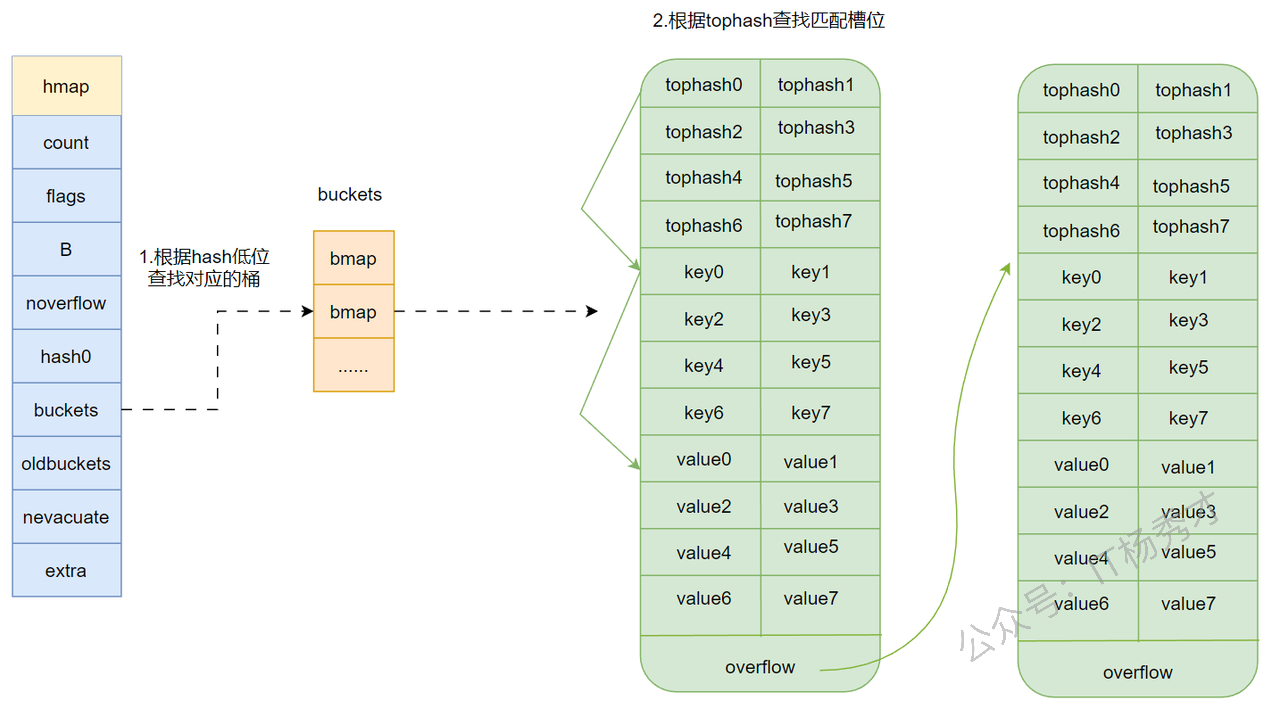
Go map 的底层实现是哈希表,核心数据结构是 hmap(hash map 的缩写),主要包含以下关键字段:
count:当前 map 中元素的数量B:桶数量的对数,桶数量为 $2^B$buckets:指向桶数组的指针oldbuckets:扩容时指向旧桶数组的指针hash0:哈希种子,增加哈希的随机性
每个桶(bmap)可以存储 8 个键值对,包含:
tophash:存储哈希值的高 8 位,用于快速定位keys和values:存储键值对overflow:指向溢出桶的指针
最后是一个 bmap 型指针,指向一个溢出桶,溢出桶的内存布局与常规桶相同,是为了减少扩容次数而引入的。当一个桶存满了,还有可用的溢出桶时,就会在桶后面链一个溢出桶,继续往溢出桶里面存。

实际上如果哈希表要分配的桶的数目大于 $2^4$,就认为使用到溢出桶的几率较大,就会预分配 $2^{B-4}$ 个溢出桶备用,这些溢出桶与常规桶在内存中是连续的,只是前 $2^B$ 个用作常规桶,后面的用作溢出桶。
🏗️ Go map 的整体结构图
Go 运行时里的 map 本质上是一个指向 hmap 的指针,而 hmap 管理整张哈希表,真正存储数据的是桶数组和溢出桶链。
📦 mapextra 与预分配溢出桶
除了 hmap 和 bmap,运行时里还有一个很容易被忽略的结构:mapextra。它主要负责维护溢出桶,尤其是 key/value 不含指针时,运行时会把溢出桶集中挂在这里,避免 GC 扫描遗漏。
|
|
overflow:当前桶数组使用到的溢出桶oldoverflow:扩容期间旧桶数组对应的溢出桶nextOverflow:预分配但尚未使用的下一个溢出桶
这也是为什么 Go map 在发生冲突时,并不总是现场申请一个新桶,而是可能直接复用已经预留好的溢出桶。
🎯 tophash 与桶内布局补充
Go 对每个 key 算出 hash 后,并不会一次性把整个 hash 都拿来比较,而是拆成两部分使用:
- 低位用于定位桶
- 高 8 位用于桶内快速过滤,也就是
tophash

每个 bmap 会先连续存储 8 个 key,再连续存储 8 个 value,而不是 key/value 交替排列。这样可以减少内存对齐带来的浪费。
🎯 哈希定位与冲突处理
类似于 Java 的 HashMap,参考往期博客 map 的哈希方法采用 与运算: hash & (m-1) 来定位哈希桶
需要注意的是,与运算方法如果想确保运算结果落在区间 [0, m-1] 而不会出现空桶,就要限制桶的个数 m 必须是 2 的整数次幂。这样 m 的二进制表示一定只有一位为 1,并且 m-1 的二进制表示一定是低于这一位的所有位均为 1。如果桶的数目不是 2 的整数次幂,就有可能出现有些桶绝对不会被选中的情况。


哈希定位过程
- Go 通过哈希函数,将 key 转成 hash(uint64)
- 桶的位置:
bucketIndex = hash & (2^B - 1),等价于hash & mask - 桶内位置:使用 hash 的高 8 位(tophash)在桶内快速查找匹配的 key
这里的两个术语可以顺手说明一下:
- hash 值:指 key 经过运行时哈希函数计算后的结果。这个值不会被整体直接拿来当桶下标,而是拆开使用。
- 掩码(mask):指定位桶位置时使用的那个值,通常就是
2^B - 1。
其中:
- hash 的低位配合掩码来定位桶;
- hash 的高 8 位会放入
tophash,用于桶内快速过滤。
例如当 B = 3 时,桶数量是 2^3 = 8,那么掩码就是 8 - 1 = 7,二进制写成 111。这时:
|
|
结果是 6,说明这个 key 会落到第 6 号桶。也可以把它理解成:掩码的作用就是把 hash 的低 B 位“抠出来”,用于快速计算桶下标。
提示
💡 哈希定位过程
-
为什么桶的个数必须是 2 的整数次幂?
- 使用与运算
hash & (m-1)定位桶,要求 m 必须是 2 的幂 - 这样 m-1 的二进制表示是低位全 1,确保哈希值能均匀分布到所有桶
- 如果不是 2 的幂,会出现某些桶永远不会被选中的情况
- 使用与运算
-
哈希定位的完整流程:
- 通过哈希函数计算 key 的哈希值(uint64)
- 使用低 B 位定位桶:
bucketIndex = hash & (2^B - 1) - 使用高 8 位(tophash)在桶内快速查找匹配的 key
🔗 Go 为什么选拉链法,而不是开放地址法?
在理解 Go map 的实现前,先看两种经典的哈希冲突处理方案。
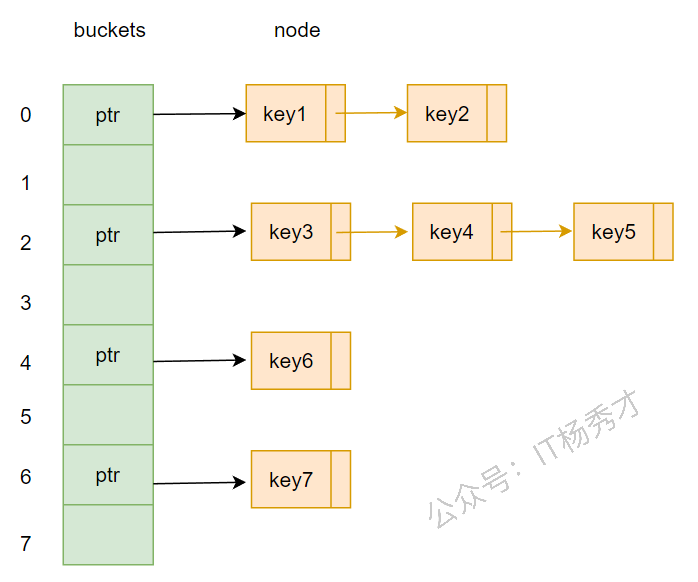
1. 拉链法
拉链法的核心思想是:桶数组负责定位,冲突的数据通过额外结构串起来。传统实现常见的是“数组 + 链表”,而 Go 做了优化,不是一个节点只放一个键值对,而是一个桶里先放 8 个键值对,桶满了再通过 overflow 指针挂溢出桶。
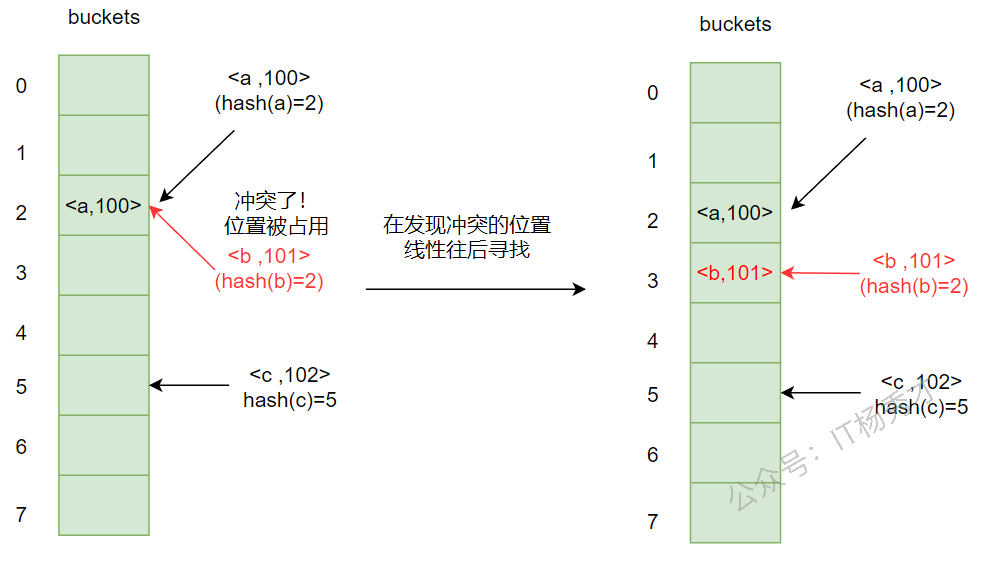
2. 开放地址法
开放地址法不再额外挂链,而是把元素都直接放在数组里。遇到冲突时,不断向后探测空槽位,直到找到可插入的位置。
|
|
**Go 最终选择的是“桶 + 溢出桶”的变种拉链法。**这样既能把冲突控制在桶和溢出桶链上,又能兼顾缓存友好性和扩容迁移效率。
⚔️ 哈希冲突
Go map 与 Java HashMap 类似,同样使用拉链法

冲突解决策略
- 当桶满时,会创建溢出桶(overflow bucket)
- 查找时会依次遍历链表上的所有桶
- 为了避免链表过长导致性能下降,当链表太长时会触发扩容
提示
💡 哈希冲突解决
Go map 使用拉链法解决哈希冲突:
- 当桶满时,创建溢出桶(overflow bucket)
- 查找时依次遍历链表上的所有桶
- 为了避免链表过长导致性能下降,当链表太长时会触发扩容
📈 扩容与迁移
🚀 扩容的触发条件
- 负载因子超过 6.5 时,触发 翻倍扩容(kv 数量 / 桶的数量 > 6.5 时,桶的数量翻倍)
- 溢出桶过多时,触发 等量扩容(溢出桶过多,分布不均浪费内存,重建 map)
扩容期间的操作处理
- 读操作:检查新旧桶,不触发迁移
- 新增操作:触发迁移,在新桶中写入
- 更新操作:触发迁移,确保目标桶已迁移后,在新桶更新数据
- 删除操作:检查新旧桶,不触发迁移
🔄 渐进式迁移

hmap 的源码如下
|
|
在哈希表扩容时,先分配足够多的新桶,然后用一个字段记录 “旧桶” 的位置 oldbuckets ,再增加一个字段记录 “旧桶” 的迁移进度,例如记录下一个要迁移的 “旧桶” 编号 nevacuate 。

在哈希表每次读写操作时,如果检测到当前处于扩容阶段,就完成一部分键值对的迁移任务,直到所有的 “旧桶” 迁移完成,“旧桶” 不再使用才算真正完成了一次哈希表的扩容。把键值对迁移的时间分摊到多次哈希表操作中的方式,就是 “渐进式扩容” 了,可以避免一次性扩容带来的性能瞬时抖动。
✨ 翻倍扩容
当负载因子大于 6.5,即 map 元素个数 / 桶个数 > 6.5 时,就会触发翻倍扩容
|
|
bucketCnt= 8,一个桶可以装的最大元素个数loadFactor= 6.5,负载因子,平均每个桶的元素个数bucketShift(B):桶的个数
此时,buckets 就会指向刚分配出来的新桶,而 oldbuckets 则会指向旧桶,并且 nevacuate 为 0,标识接下来要迁移编号为 0 的旧桶,每个旧桶的键值对都会分流到新桶中。
同时这里体现出桶的个数设置为2的n次方的优点,当 Map 扩容时,通过容量为 2 的 n 次方,扩容时只需通过简单的位运算判断是否需要迁移,这减少了重新计算哈希值的开销,提升了重新哈希的效率。
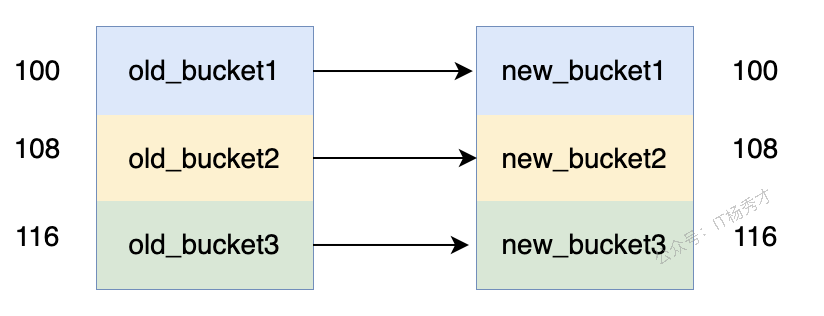
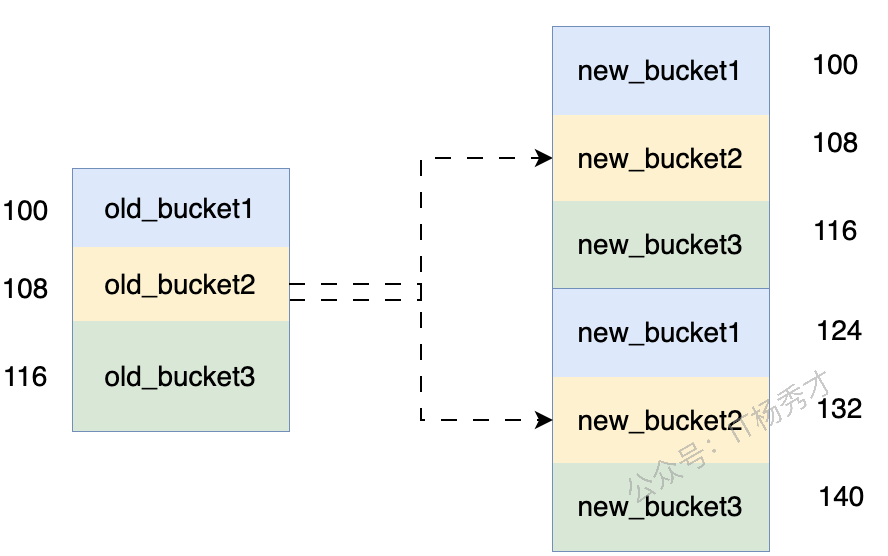
例如,旧桶的数量为 4,那么翻倍扩容后新桶的数量就为 8。

不需要每个 bucket 重新 hash 算下标。因为元素的新位置只与高位有关
此时迁移桶只要判断原来的 hash 拓展后新增的位是 0 还是 1

若为 0 则保持在原来的位置(hash 1 保持为 0)
若为 1 则被移动到原来的位置加上旧数组长度的地方(hash 2 被移动到 0+4=4 处)
🔃 等量扩容
如果负载因子没有超标,但是使用的溢出桶较多,也会触发扩容:
- 当常规桶数量不大于 $2^{15}$ 时(B <= 15),此时如果溢出桶总数 >= 常规桶总数(
noverflow>= $2^B$),则认为溢出桶过多,就会触发等量扩容。 - 当常规桶数量大于 $2^{15}$ 时(B > 15),此时直接与 $2^{15}$ 比较,当溢出桶总数 >= $2^{15}$ 时(
noverflow>= $2^{15}$),即认为溢出桶太多了,也会触发等量扩容。
|
|
所谓等量扩容,就是创建和旧桶数量一样多的新桶,然后把原来的键值对迁移到新桶中。当有很多键值对被删除的时候,就有可能出现已经使用了很多溢出桶,但是负载因子仍没有超过上限值的情况。此时如果触发了等量扩容,则会分配等量的新桶。而旧桶的每一个桶则会迁移到对应的新桶中,迁移完后可以使每个键值对排列的更加紧凑,从而减少溢出桶的使用。

提示
💡 Map 扩容机制
-
为什么使用渐进式扩容?
- 避免一次性扩容导致的性能抖动
- 将迁移时间分摊到多次读写操作中
-
扩容期间的操作:
- 读操作:检查新旧桶
- 写操作:触发迁移后在新桶操作
- 删除操作:检查新旧桶
-
两种扩容方式的区别:
- 翻倍扩容:负载因子 > 6.5 时触发,桶数量翻倍
- 等量扩容:溢出桶过多时触发,桶数量不变,重新整理数据
⚙️ 常见操作的运行时行为
🔍 map 的访问原理
对 map 的读取,表面上只有两种写法:
|
|
这两种写法的返回形式不同,运行时走到的访问路径也不完全一样,但核心查找流程是一致的。
但运行时内部会做更多事情:
- 先判断 map 是否为
nil或元素数量是否为 0。 - 做一次 map 写检测。如果当前 map 正处于写状态,运行时会直接报
fatal error,避免读写并发把哈希表状态破坏掉。 - 计算 key 的哈希值和掩码,并用低位确定桶的位置。
- 如果当前 map 正在扩容,需要先判断目标桶是否已经迁移:
- 已迁移,就到新桶里找。
- 未迁移,就先到旧桶里找。
- 进入目标桶后,先用哈希值高 8 位的
tophash做一次快速过滤,再决定是否继续比较真正的 key。 - 遍历当前桶中的 8 个槽位:
tophash相同,就继续比较 key 本身。- key 也相同,就直接返回对应 value。
tophash不同,则继续看下一个槽位。- 如果遇到表示“后续为空”的状态位,可以直接提前结束查找,因为后面不可能再有这个 key。
- 当前桶没找到,就沿着
overflow指针继续遍历溢出桶,重复同样的查找过程。 - 全部找完仍未命中时,返回 value 类型的零值;双返回值形式下,
ok为false。
访问流程示意图:
这里有两个容易忽略的细节:
- 读操作虽然不会修改 map 的逻辑内容,但在扩容阶段,访问旧桶时依然可能顺手触发部分桶迁移。 这也是 Go 渐进式扩容的重要特征。
- 查找时并不是一上来就对每个 key 做完整比较,而是先看
tophash,只有高 8 位匹配时才继续比对真正的 key,这样可以明显降低桶内比较成本。
✍️ map 的赋值原理
赋值入口看起来很简单:
|
|
但运行时内部会依次完成这些动作:
- 检查 map 是否已初始化;对
nil map赋值会直接panic。 - 检查写标志位,避免并发写破坏哈希表状态。
- 计算哈希值,找到目标桶。
- 如果目标桶处于扩容区间,先触发该桶迁移。
- 在主桶和溢出桶里按
tophash -> key的顺序查找。 - 找到同 key 就覆盖 value;找不到且有空槽就插入;都满了就挂新的溢出桶。
补充了一个很适合面试时说的点:Go runtime 会维护一个写标志位 hashWriting。当一个 goroutine 正在写 map 时,另一个 goroutine 再写或者与读并发冲突,就可能触发:
|
|
所以 Go 的普通 map 从设计上就是非并发安全的。
🗑️ map 的删除原理
delete(m, key) 的行为比很多人想象得更“温和”:
- 删除不存在的 key,不报错。
- 对
nil map执行delete,合法但无效果。 - 删除元素后,不会立刻归还桶内内存。
运行时内部删除时,会把对应槽位标成空状态。常见的两个状态可以这样理解:
emptyOne:这个位置空了,但后面可能还有元素。emptyRest:从这个位置往后都可以视为没数据了,查找时可以提前结束。
删除动作对应的核心逻辑位于 runtime.mapdelete。在真正清空目标槽位之前,前置流程和访问、赋值类似,也会先做写检测、定位 bucket,并找到目标 key 所在的位置。
清空槽位时,运行时会把 tophash 状态向前收紧,核心代码类似下面这样:
|
|
这段逻辑的重点是:
- 找到目标 key 后,会先清掉该槽位对应的 key/value。
- 如果该槽位后面已经没有有效元素,就把当前位置从
emptyOne进一步收紧为emptyRest。 - 然后继续向前检查前一个槽位:
- 如果前一个槽位也只是普通空位
emptyOne,就继续把它推进成emptyRest; - 一旦遇到前面还有有效元素,就停止。
- 如果前一个槽位也只是普通空位
这样做的目的,是尽量把“后续已经没有元素”这个事实向前传播。因为在查找时,一旦碰到 emptyRest,运行时就可以直接停止继续扫描当前桶或这段连续槽位,避免无意义比较。
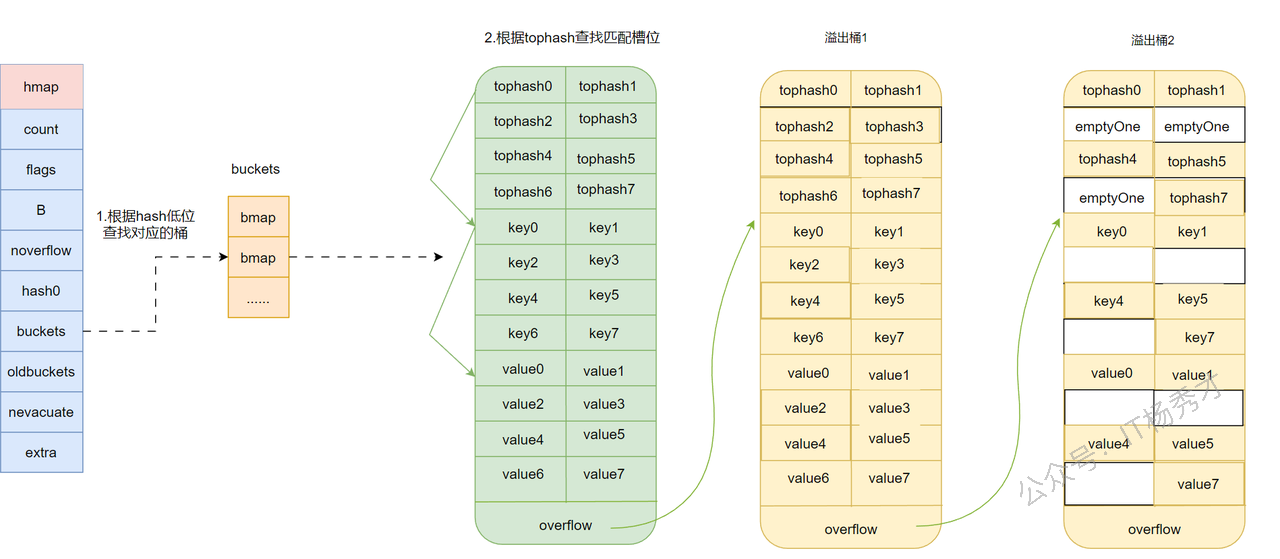
举个更直观的例子:
- 假设当前 map 的状态如第一张图所示。
overflow bucket 2后面没有继续挂新的溢出桶,或者后续溢出桶里已经没有数据。- 这时
overflow bucket 2中第2、3、6个位置是普通空槽,也就是emptyOne。
如果这时删除了 overflow bucket 1 中的 key2、key4,以及 overflow bucket 2 中的 key7,删除后的状态就会变成第二张图:
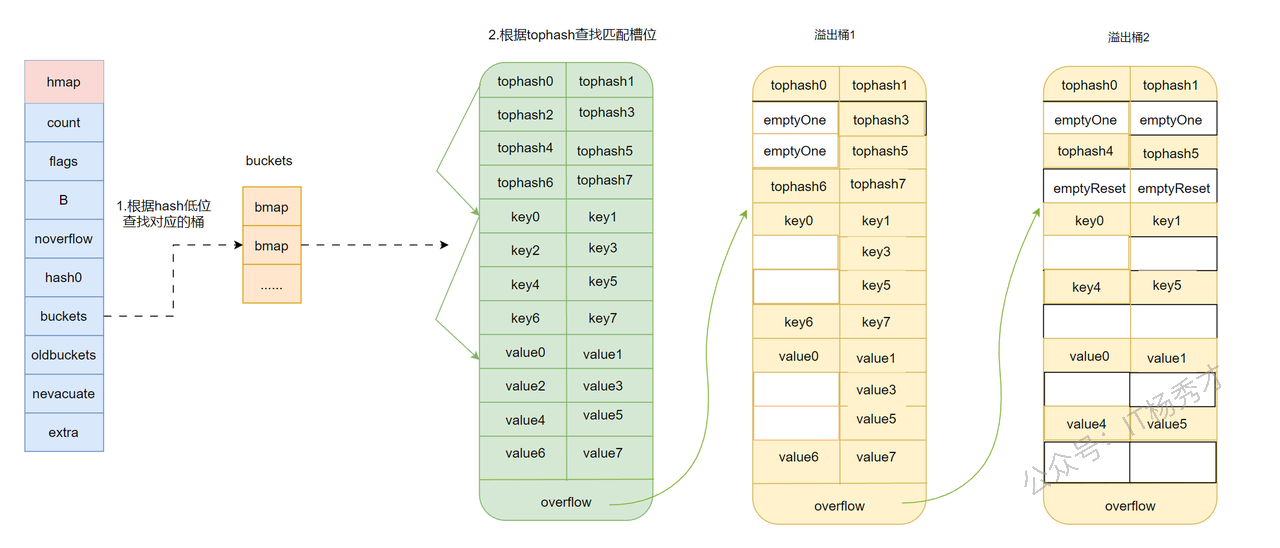
这个例子想说明的是:
- 删除 key 之后,运行时不会简单地只把当前位置标空就结束。
- 它会继续检查这个槽位后面是否还有有效元素。
- 如果确认后面已经没有元素,就会把当前位置以及前面一段连续的
emptyOne尽可能推进成emptyRest。
这样处理之后,后续查找一旦扫到这段 emptyRest,就能立刻判断“后面不可能再有数据”,不需要继续往后遍历溢出桶里的剩余槽位。
图例详解:按删除顺序看状态是怎么变化的
可以按 key2 -> key4 -> key7 这三个删除动作来理解这两张图。
第一次删除 key2
- 运行时先定位到
key2所在槽位,并把该位置清空。 - 但这时
key2后面通常还挂着别的有效元素,比如后续槽位里的key4,或者后面的溢出桶里还有key7。 - 所以这个位置虽然空了,但还不能直接认定“后面都没数据了”。
- 这时它更可能保持为
emptyOne,意思是:这里空了,但后面可能还有元素,查找还不能停。
第二次删除 key4
- 删除
key4后,运行时会继续判断key4后面是否还有有效元素。 - 如果这时后续溢出桶里仍然还有
key7,那么查找链路就还没断。 - 所以
key4这个位置也不能直接升级成emptyRest。 - 换句话说,前面虽然越来越空,但只要后面还存在有效元素,前面的空槽就只能算“普通空位”,不能算“尾部全空”。
第三次删除 key7
- 这是这个例子里最关键的一步,因为
key7已经位于后面那段有效元素的尾部。 - 当
key7被删掉后,运行时再往后看,发现后面已经没有任何有效元素了。 - 这时
key7所在位置就可以标成emptyRest。 - 接着,运行时会继续往前回看:
- 如果前一个槽位原本只是
emptyOne,但它后面现在也已经彻底没有有效元素了; - 那它也可以从
emptyOne进一步推进成emptyRest。
- 如果前一个槽位原本只是
- 于是就会出现一段连续空槽被“整体收紧”的效果。
这就是为什么源码里的删除逻辑不是“删完当前槽位就结束”,而是会继续向前扫描。它的目标不是只清空一个位置,而是尽可能把一段连续的普通空位压缩成“后续全空”的状态。
可以把这两个状态简单理解成:
emptyOne:这里空,但后面也许还有货。emptyRest:这里开始,后面整段都空了,可以直接停止查找。
这里再补关键结论:map 删除 key 采用的是标记为空的策略,不会立即释放对应内存。只有整个 map 不再被引用时,才由 GC 回收。 这也解释了为什么大量删除后,如果很在意内存占用,通常需要重建一个新的 map。
🔁 map 的遍历原理
Go 对 map 的遍历故意做成“无序”,不是副作用,而是设计目标。
运行时遍历依赖一个迭代器 hiter,它会记录:
- 当前遍历到哪个桶
- 从桶内哪个槽位开始
- 当前 map 是否处于扩容状态
- 当前桶对应的新旧桶信息
初始化迭代器时,运行时会做两次随机选择:
- 随机选一个起始桶
startBucket - 随机选一个桶内起始槽位
offset
这就是为什么同一个 map 多次 range,顺序也可能不同。这样做的好处有两个:
- 防止开发者错误依赖遍历顺序
- 扩容是渐进式的,元素位置本来就可能变化,无序更符合真实语义
如果在遍历期间遇到还没迁移完的旧桶,运行时会优先从旧桶中筛出本轮应该返回的那部分 key,再继续推进遍历。
💡 补充结论
map的冲突处理不是简单链表,而是“一个桶放 8 个 kv + overflow 桶链”。map扩容不是一次搬完,而是按访问逐步迁移。- 读操作在扩容期间也可能触发迁移,这一点很容易被忽略。
delete只是标空,不会立刻释放桶内内存。- 普通
map的并发读写会被运行时直接判定为致命错误。