聊到Go语言,大家最津津乐道的可能就是它那"天生强大"的并发能力了。一个简单的 go 关键字,就能开启一个并发执行单元,这酸爽,谁用谁知道。但是,你有没有想过,这背后到底藏着什么样的魔法?为什么Go的并发可以如此轻盈、如此高效?
答案,就藏在它核心的 GMP调度模型里。
🧠 了解基础概念
🧵 从线程到协程
在聊GMP之前,我们得先搞明白两个老朋友:线程(Thread) 和 协程(Coroutine)。

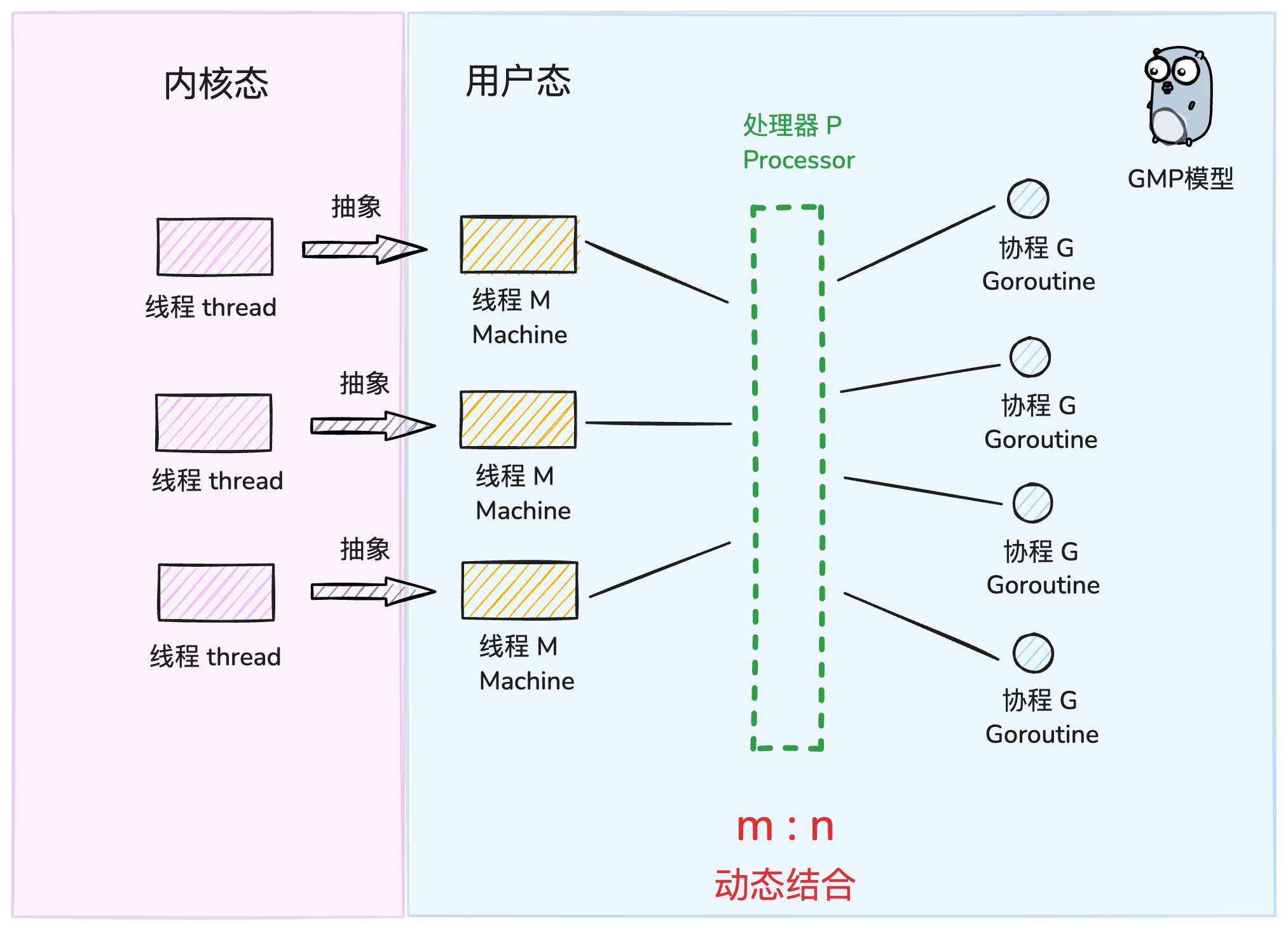
线程(Thread):这家伙是操作系统的大内总管——内核(Kernel)眼里的最小执行单元。它的生老病死、工作调度,全得听内核的号令。你可以把它想象成一个正式工,有编制,但每次调度(切换)都得走一套复杂的流程,成本比较高。
协程(Coroutine):这家伙更像是用户自己请的临时工。它活在用户态,比线程更轻量,可以理解为用户态线程。多个协程可以在一个线程上跑,它们的调度切换由用户程序自己说了算,不用去麻烦内核这个大忙人。所以,协程的切换开销极小,非常灵活。
简单总结一下:线程是内核级的,重而稳;协程是用户级的,轻而快。
🚀 goroutine
Go语言选择的并发实现,就是我们所熟知的 goroutine。你可以把它看作是Go对协程的"超级魔改版"。它并不是一个孤立的概念,而是整个 GMP调度体系 的核心产物。
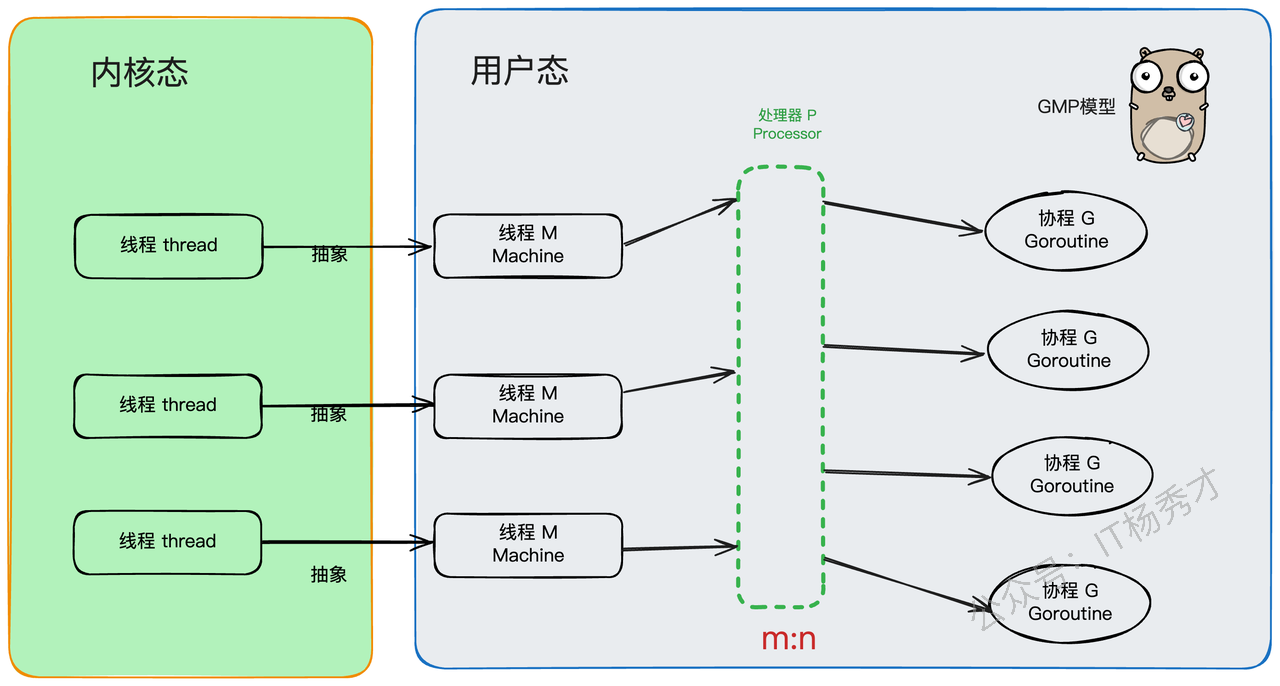
正是因为有了GMP这套精妙的架构,goroutine才拥有了超越原生协程的两大核心优势:
灵活的调度:G(goroutine)、M(Machine,内核线程)、P(Processor,处理器)三者之间可以动态地绑定和解绑,整个调度过程充满了弹性。Go runtime 负责调度,上下文切换延迟 0.2 微秒(线程 1-2 微秒),仅保存必要寄存器状态。
动态的栈空间:每个goroutine的栈空间可以根据需要自动伸缩,既方便使用,又极大地节约了内存资源。初始栈空间 2KB(线程 1MB+),支持百万级创建,启动销毁成本低。
更牛的是,Go语言在顶层完全屏蔽了线程这个概念,所有的并发操作都是围绕着goroutine来的,就像秦始皇统一了度量衡,Go也用goroutine统一了并发江湖的秩序。
🎯 具体使用
在具体使用上调用函数的时候在前面加上go关键字,就可以为一个函数创建一个goroutine。
| |
在程序启动时,Go程序就会为main()函数创建一个默认的goroutine。当main()函数返回的时候该goroutine就结束了,所有在main()函数中启动的goroutine会一同结束,所以在实际使用goroutine时需要特别注意其调度。
⛔ 什么时候会阻塞
goroutine 的阻塞和线程阻塞不是一回事。很多场景下,被挂起的是当前 goroutine,不是整个 OS 线程,这也是 Go 并发模型高效的关键之一。常见阻塞场景包括:
channel发送或接收:无缓冲channel没有配对方,或者有缓冲channel已满 / 已空时,当前 goroutine 会阻塞。- 系统调用与 I/O:例如文件 I/O、网络 I/O、阻塞式 syscall。
- 等待锁:例如等待
sync.Mutex。 - 显式休眠:调用
time.Sleep。 - 主动让出 CPU:调用
runtime.Gosched()。
这些阻塞点最终都会回到 Go runtime 的调度体系中处理,所以从效果上看,Go 能做到“一个 goroutine 挂起,其他 goroutine 继续跑”。
如果把这件事再说得更“调度器视角”一点,常见触发调度的时机就是四类:等待无缓冲 channel 的读写配对、因为 time.Sleep() 进入休眠、等待互斥锁释放,以及进入系统调用。它们本质上都会让当前 G 暂时离开 CPU,把执行权交还给调度器。
在循环中创建goroutine时需要尤其注意,goroutine 会捕获循环变量的引用,而非值。若循环内未正确处理,所有 goroutine 可能最终使用同一变量的最终值(而非各自迭代时的值)。
解决方案
- 通过参数传递数据到协程
| |
- 定义临时变量
| |
⏳ 生命周期
从调度视角看,goroutine 的生命周期可以概括为五个阶段:
⚙️ 调度模型
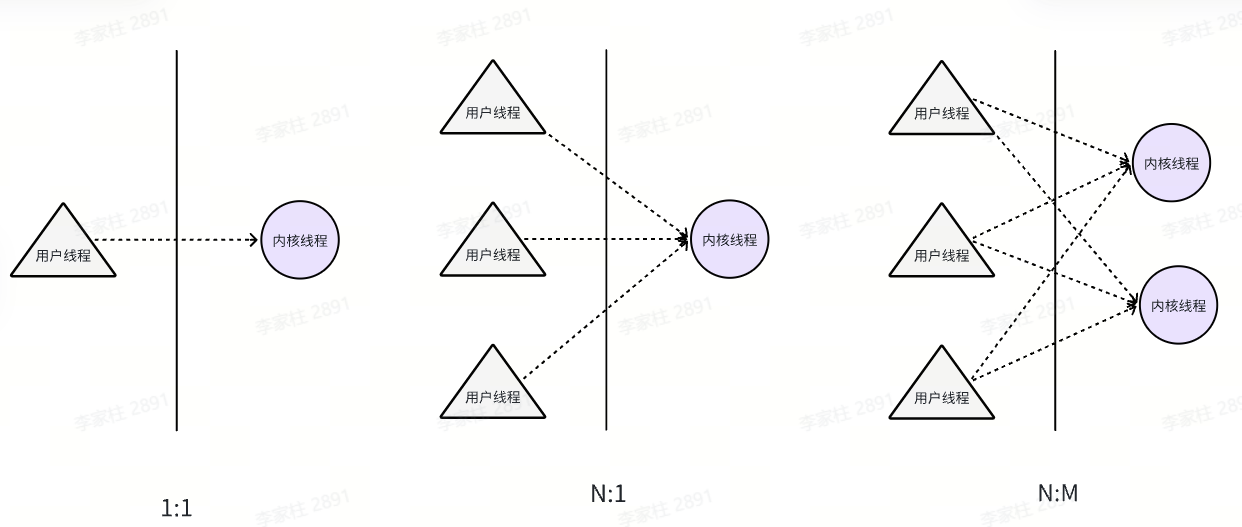
线程模型:根据运行的环境和调度者的身份,线程可分为用户级线程和内核级线程,用户级线程在用户态创建、同步和销毁,由线程库来调度。内核级线程则运行在内核空间,由内核来调度,在有的系统上也称为LWP(轻量级进程)。当进程的一个内核级线程获得CPU的使用权时,它就加载并运行一个用户级线程,可见,内核级线程相当于用户级线程的容器,一个进程可以拥有M个用户级线程和N个内核级线程。按照M:N的取值,可分为三种线程模型
- N:1 模型:即N个协程对应1个内核级线程。该模型完全在用户空间实现,线程库负责管理所有的执行线程,比如线程的优先级、时间片等。线程库利用longjmp来切换线程的执行,使得看起来像是并发执行,但实际上内核仍然是把整个进程作为最小单元调度的,该进程的所有执行线程共享进程的时间片,对外表现出相同的优先级。
- 优点:线程切换在用户态完成,创建和调度线程都无需内核的干预,不会对系统性能造成明显的影响
- 缺点
- 对于多处理器系统,一个进程的多个线程无法运行在不同的CPU上,无法充分利用CPU多核的算力。
- 1个进程的所有协程都绑定在1个线程上,一旦某协程阻塞,造成线程阻塞,本进程的其他协程都无法执行了,无并发能力
- 1:1 模型:即每个用户级线程对应一个内核级线程例如
Java Thread。该模型完全由内核创建和调度线程,用户空间的线程库不需要进行进程管理。- 优点:充分利用CPU的算力资源,支持多核
- 缺点:开销大,线程切换要陷入内核导致线程上下文切换较慢,数量上限受内核限制
- N:M 模型:即前两种模型的结合,M个用户线程对应N个内核级线程的双层调度模式。该模式内核调度M个内核线程,线程库调度N个用户线程。Go语言采用这种模型
- 优点:充分结合前两种模式的优点,不但不过分消耗内核资源,而且线程切换速度也比较快,充分利用多处理器的优势
- 缺点:该模型的调度算法复杂。
🕰️ Go1.1之前的GM模型
在 Go 1.1版本之前,其实用的就是GM模型。
- G:协程,通常在代码里用
go关键字执行一个方法,那么就等于起了一个G。 - M,内核线程,操作系统内核其实看不见
G和P,只知道自己在执行一个线程。G和P都是在用户层上的实现。
除了 G 和 M 以外,还有一个全局协程队列,这个全局队列里放的是多个处于可运行状态的 G 。M 如果想要获取 G ,就需要访问一个全局队列。同时,内核线程M是可以同时存在多个的,因此访问时还需要考虑并发安全问题。因此这个全局队列有一把全局的大锁,每次访问都需要去获取这把大锁。并发量小的时候还好,当并发量大了,这把大锁,就成为了性能瓶颈。
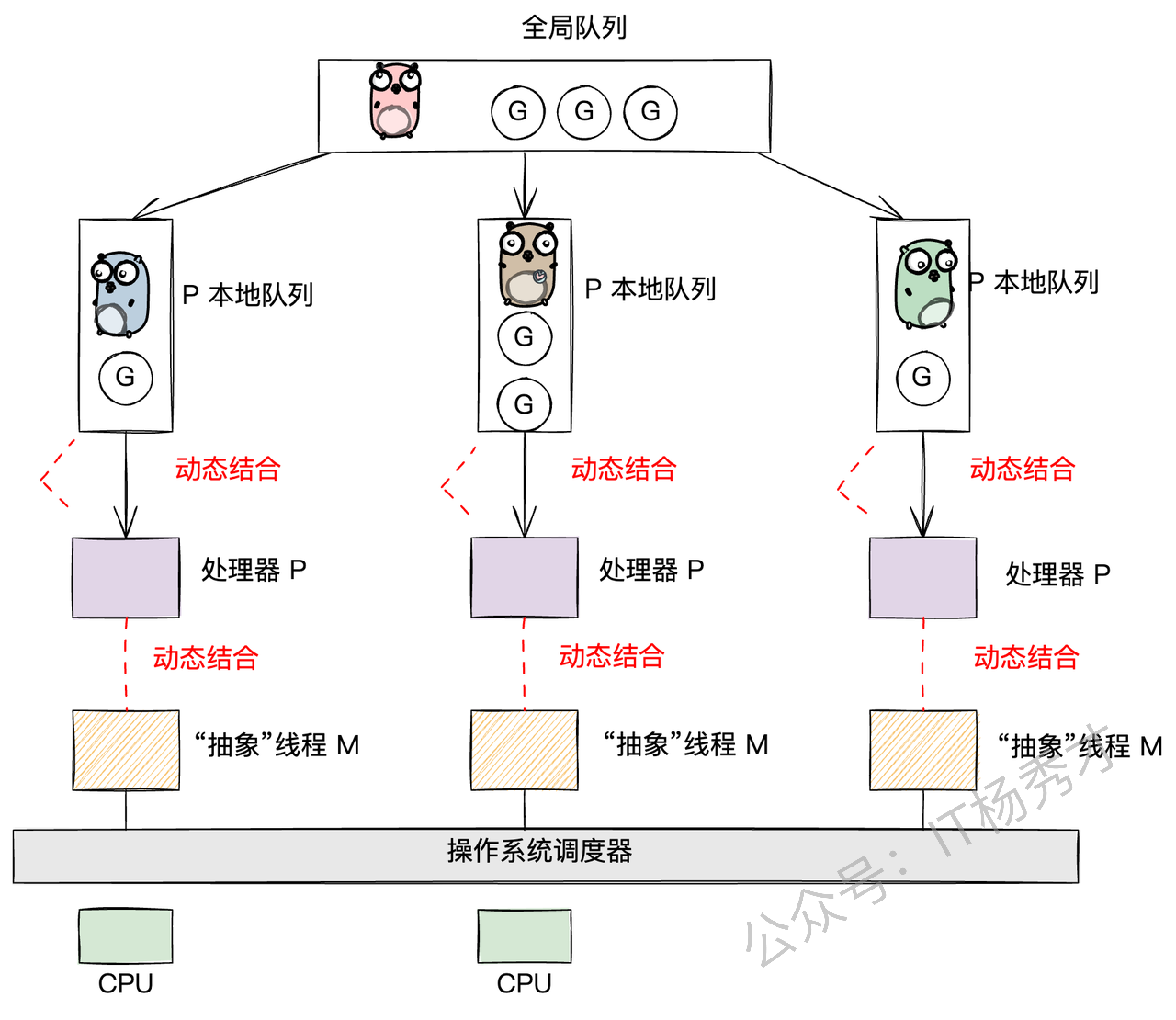
🏗️ GMP 架构全景图
好了,主角登场!GMP,顾名思义,就是 Goroutine + Machine + Processor。
G(Goroutine):就是我们的"任务单元"。它有自己的执行栈、生命状态,以及要完成的具体工作(就是你
go后面跟的那个函数)。GG 并非执行体,需要绑定到M上才能运行,你可以把M想象成G的CPU。M(Machine):你可以把它看作Go对系统线程的封装,是真正干活的"工人"。作为OS 线程抽象,代表着真正执行计算的资源,由内核进行调度。M需要和P"绑定"后,才能进入GMP的调度循环。M的工作很简单,就是在
g0(一个特殊的goroutine,负责调度)和普通的G之间反复横跳:执行g0时,它在找任务;执行普通G时,它在处理任务。P(Processor):P是调度器,是GMP模型中的"中枢大脑"。M必须获取到一个P,才能开始调度和执行G。P的数量决定了同一时间最多有多少个M可以处于运行状态,这个数量通常由
GOMAXPROCS环境变量决定。但是不论GOMAXPROCS设置为多大,P的数量最大为256个。P还有一个非常重要的职责:它自带一个本地的goroutine队列,我们称之为 LRQ (Local Run Queue)。
✨ GMP 的核心优势
从更高一层看,GMP 的价值不只是“能调度 goroutine”,而是它把 Go 的高并发能力建立在了一个成本更低、控制力更强的运行时模型上:
- 轻量级调度:goroutine 的切换主要发生在用户态,通常只需要保存和恢复少量寄存器信息,开销远小于线程切换。
- 用户态调度:调度逻辑主要由 Go runtime 自己完成,不需要每次都陷入内核,因此更灵活,也减少了系统调用带来的成本。
- 多核并行能力:P 的数量通常由
GOMAXPROCS控制,每个 P 在同一时刻都可以支撑一个 goroutine 真正并行执行。 - 更适合高并发场景:海量 goroutine 可以复用少量线程运行,这也是 Go 能轻松承载成千上万并发任务的根本原因。
不过也要注意一点:对于 CPU 密集型任务,并发数并不是越大越好。GMP 能充分利用多核 CPU,但最优并发度通常仍然接近 CPU 核数,它真正擅长的场景还是“高并发 + 大量等待 / 阻塞”的任务模型。
🗃️ G、M、P 各自保存什么
如果把 GMP 看成一套调度系统,那么 G、M、P 三者各自维护的信息也非常不同:
- G:保存 goroutine 的执行上下文,例如栈指针、程序计数器、运行状态,以及与调度相关的信息。
- M:保存线程级上下文,例如线程 ID、当前运行的 G、绑定的 P,以及用于调度的
g0。 - P:保存调度资源,例如本地运行队列、计时器、内存分配上下文
mcache,以及部分 GC 相关状态。
换句话说,G 更像“任务”,M 更像“工人”,P 更像“调度中枢 + 资源容器”。三者拆开设计之后,Go runtime 才能同时做到高吞吐、低锁竞争和动态调度。
📊 G、M、P 的状态概览
除了组件职责不同,三者在运行时也有各自的状态机:
- G 的常见状态:
_Gidle、_Grunnable、_Grunning、_Gsyscall、_Gwaiting、_Gdead。 - M 的常见状态:运行中、空闲、自旋找活、陷入系统调用、被 GC 暂停等。
- P 的常见状态:
_Pidle、_Prunning、_Psyscall、_Pgcstop、_Pdead。
这些状态并不是孤立存在的。比如一个正在运行的 G 发起系统调用时,G 可能转入 _Gsyscall,对应的 M 进入 syscall 相关状态,P 则会被解绑并尝试转交给其他 M。后面你在源码部分看到的很多调度逻辑,本质上都是围绕这些状态切换展开的。
🧭 GMP 的工作流程
从流程上看,一个 goroutine 在 GMP 中的大致路径可以概括成下面几步:
- 程序启动:runtime 初始化
M0、G0,并按GOMAXPROCS创建一组 P。 - 创建 G:执行
go func()时,runtime 创建新的 G,并优先放入当前 P 的本地队列。 - 调度执行:M 绑定某个 P 后,从本地队列、全局队列、
netpoll或其他 P 的队列中取出可运行 G。 - 发生阻塞:如果 G 等待 I/O、锁、
channel或 syscall,它会让出执行权,调度器转去执行其他 G。 - 被重新唤醒:等待条件满足后,G 被重新放回可运行队列,再次参与调度。
这个流程听起来很简单,但它背后真正厉害的地方在于:队列是分层的、资源是可转移的、阻塞是可让渡的、长时间运行的任务还能被抢占。也正是这些设计共同组成了 Go 的并发调度能力。
可以把这套流程再压缩成一句话:M 必须先绑定 P 才能执行 G;每个 P 都维护自己的本地运行队列,长度上限是 256;当本地队列取空后,M 会按“本地队列 -> 全局队列 -> netpoll -> 其他 P 的本地队列”这个优先级继续找活,这就是 Go runtime 的典型调度路径。
提示
我们可以把GMP理解为一个任务调度系统.
- G就是这个系统中所谓的 任务 ,是一种需要被分配和执行的"资源"
- M就是这个系统中的"引擎",当M和P结合后,就限定了引擎的运行是围绕着GMP这条轨道进行的,使得引擎运行着两个周而复始、不断交替的步骤——寻找任务(执行g0),执行任务(执行g)
- P就是这个系统中的"中枢",当其和作为"引擎" 的M结合后,才会引导引擎进入GMP的运行模式;同时 p 也是这个系统中存储"任务"的"容器",为"引擎"提供了用于执行的任务资源。
P和M的数量
- P的数量:由启动时环境变量
$GOMAXPROCS或者是由runtime的方法 **GOMAXPROCS()**决定。这意味着在程序执行的任意时刻都只有$GOMAXPROCS个goroutine在同时运行。 - M的数量
- go语言本身的限制:go程序启动时,会设置M的最大数量,默认10000.但是内核很难支持这么多的线程数,所以这个限制可以忽略。
- runtime/debug中的
SetMaxThreads函数,设置M的最大数量 - 一个M阻塞了,会创建新的M。
P和M的创建时机
- P 是在调度器初始化阶段统一创建出来的。runtime 会在
schedinit()里调用procresize(),按照GOMAXPROCS初始化allp数组;之后只有在显式调整runtime.GOMAXPROCS()时,P 的数量才会重新分配。 - M 则是按需创建的。程序启动时先有
m0,后续如果发现没有空闲 M 可以绑定 P,或者已有 M 大量阻塞在 syscall 中,但系统里仍有可运行的 G,就会通过startm()、newm()、newosproc()拉起新的系统线程,最后从mstart()进入调度循环。
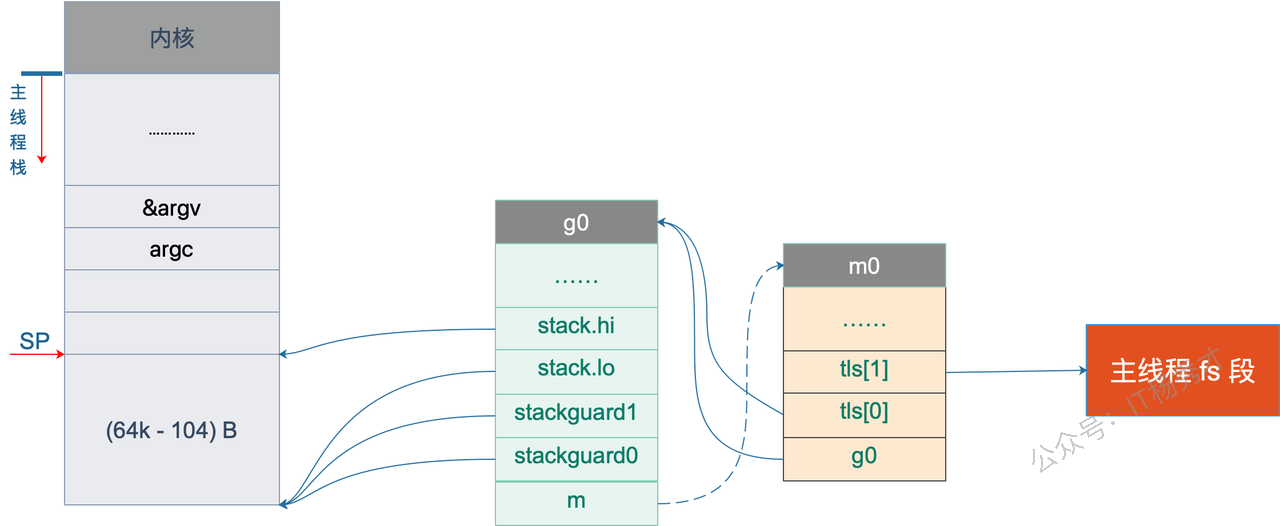
M0和G0
M0是启动程序后的编号为0的主线程,这个M对应的实例会在全局变量runtime.m0中,不需要在heap上分配,M0负责执行初始化操作和启动第一个G(main), 在之后M0就和其他的M一样了。G0是每次启动一个M都会第一个创建的goroutine,G0仅用于负责调度的G,G0不指向任何可执行的函数, 每个M都会有一个自己的G0。在调度或系统调用时会使用G0的栈空间, 全局变量的G0是M0的G0
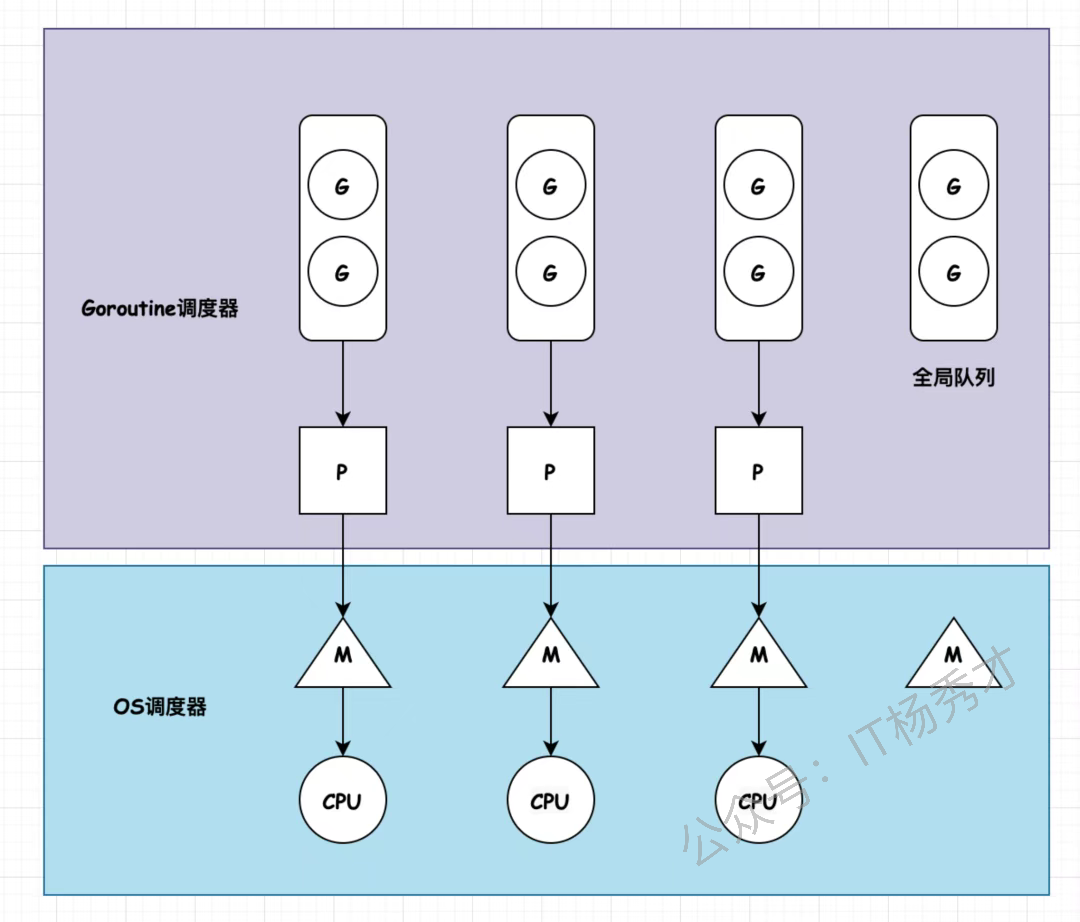
上图中有三个工作线程M,每个工作线程M持有一个处理器P,并且每个M持有一个协程G正在运行。每个处理器P持有一个运行队列,包含待调度的协程G,除此以外,还会有一个全局的队列,包含待调度的协程,被多个处理器P共享。
通常而言,每个处理器P上的协程G,若要创建新的协程,新创建的协程会放入到本地的运行队列中。当本地的队列满了,或者阻塞的协程被唤醒,协程会被放到全局的队列中。处理器P除了会消费本地队列中的协程P以外,还会周期性的消费全局队列中的协程G,避免全局队列中的协程P"饿死"。
🗂️ 存放G的"容器"
现在,我们把目光聚焦到存放G的"容器"上。Go的设计非常巧妙,它有两种队列:
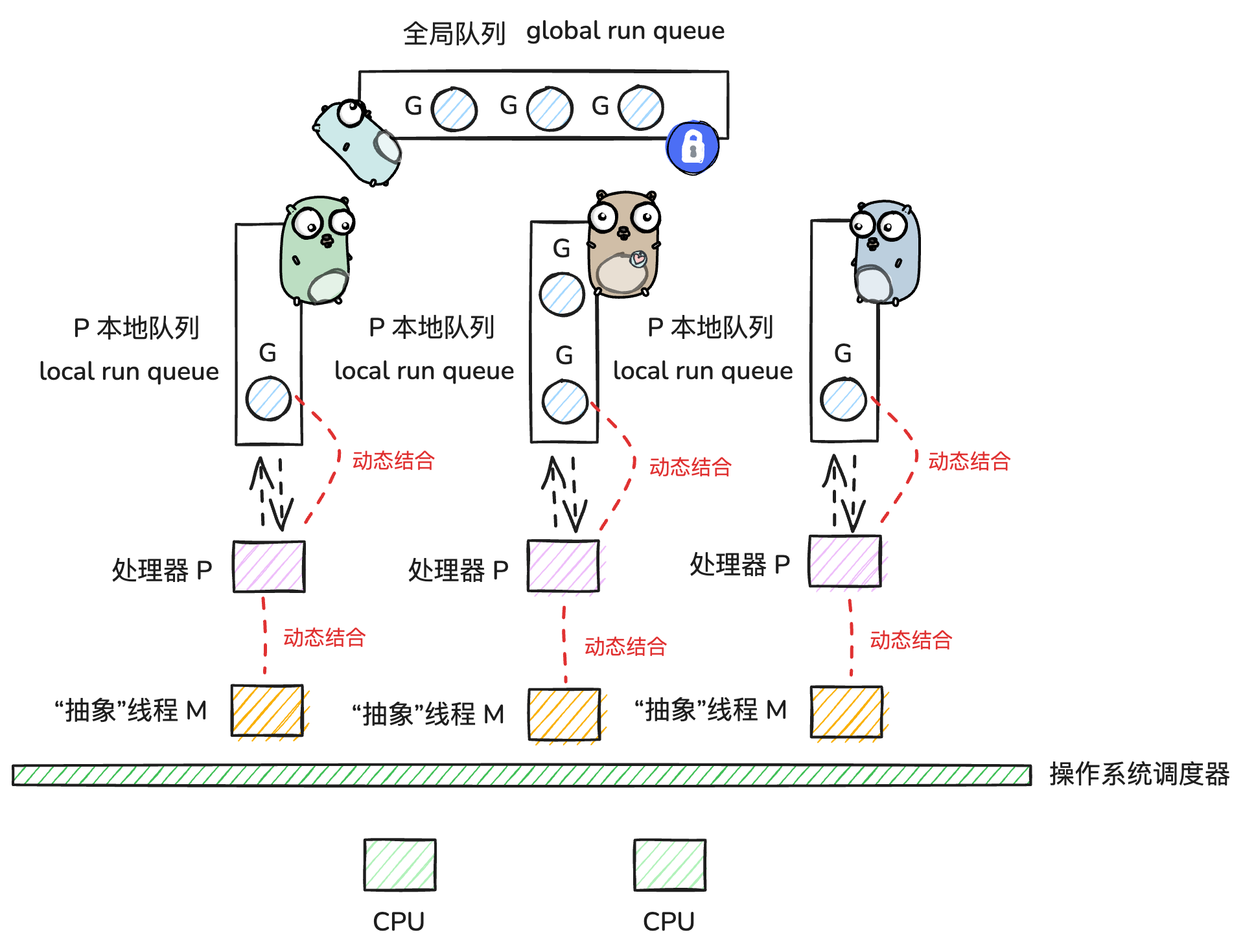
P的本地队列(LRQ - Local Run Queue):这是每个P私有的G队列。当一个M想执行G时,会优先从自己绑定的P的LRQ里找。因为是私有的,所以大部分时间不需要加锁,通过高效的CAS(Compare-And-Swap)操作就能完成存取,大大减少了并发冲突。当然,也并非完全没有冲突,因为当一个P的LRQ空了的时候,它可能会从其他P的LRQ里"偷"一些G过来,这就是著名的 work-stealing 机制。
全局队列(GRQ - Global Run Queue):这是一个全局共享的G队列。当一个P的LRQ满了,新创建的G就会被放到GRQ里。因为是全局共享的,所以所有M都可能来访问,竞争激烈,因此访问它需要加一把全局大锁。
📥 G的存放与获取逻辑
G的存放与获取逻辑:
放G(put g):当你在一个goroutine里通过
go func(){...}创建一个新的goroutine时,它会优先被放到当前P的LRQ里。如果LRQ满了,没办法,只能加个全局锁,把它扔到GRQ里去。这遵循的是"就近原则"。取G(get g):当M上的
g0开始找活干时,它会遵循一个"负载均衡"的策略,按以下顺序来寻找G:先从当前P的LRQ里找(无锁,速度最快)。
如果LRQ没有,就去全局GRQ里看看(需要加锁)。
如果GRQ也没有,就去网络轮询器(netpoll)里找找有没有因为IO操作而就绪的G。
每个协程中产生的新协程,会被优先调度到本地的运行队列中,因此可能会出现,部分处理器 P 本地队列很大,部分处理器本地队列很小甚至为空的情况。因此 go 调度器实现了当处理器 p 本地队列为空时,窃取别的队列中的协程 G 的策略(work-stealing,无锁)。从别的P的LRQ里偷一半过来。如图所示,M1 对应的本地队列为空,此时它会查看全局队列中是否有协程需要调度,如果也没有,则会从别的正在运行的 P 中窃取一半的协程 G,窃取结果如图所示。
- 为避免某个协程长时间执行,而阻碍别的协程被调度,监控线程sysmons会监控每个协程的运行时间,一旦运行时间过长(超过10ms)且有其他协程在等待时,会将运行中的协程暂停,转而调度等待的协程,达到类似于时间片轮转的效果
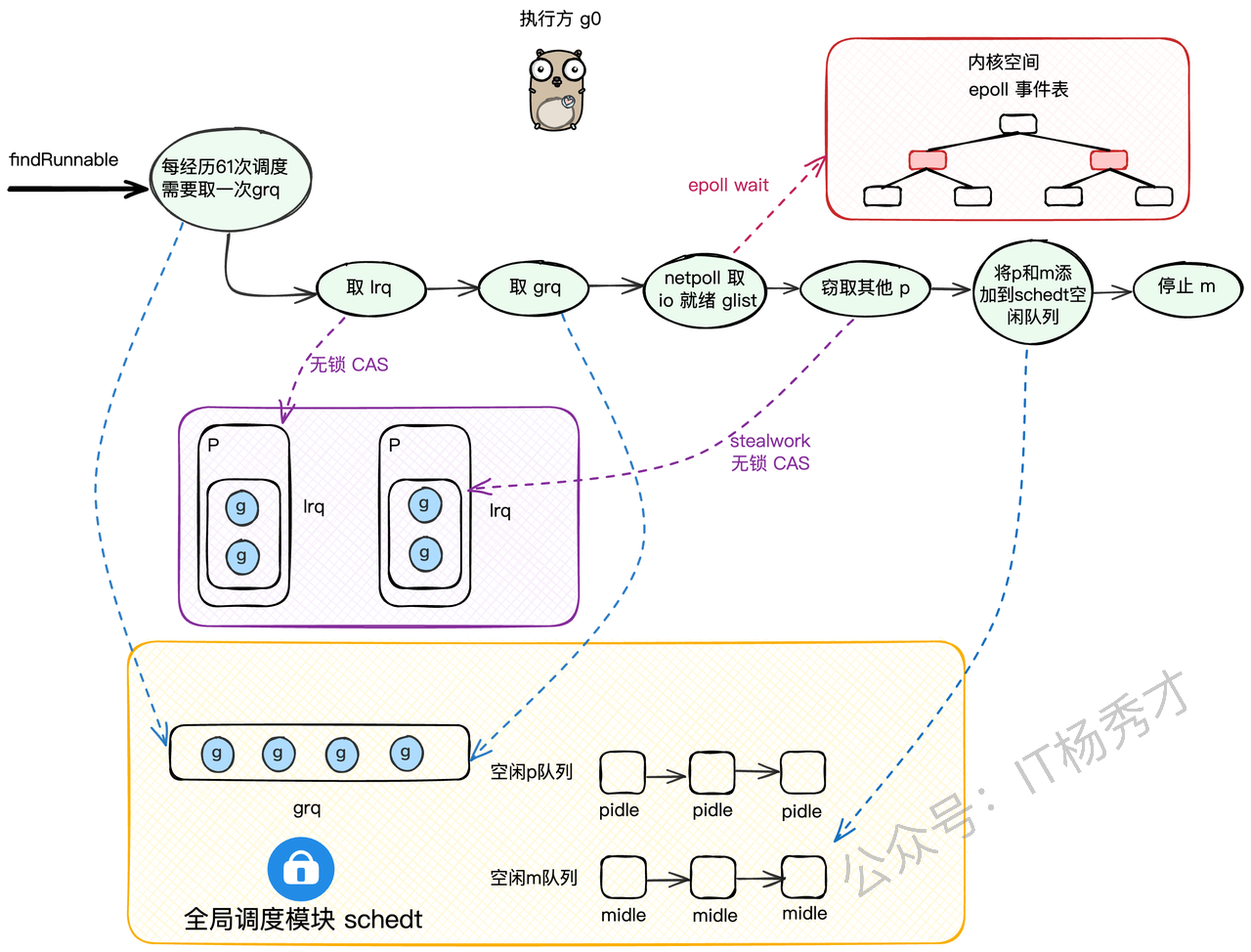
每个处理器P维护一个待调度协程G的队列,依次调度协程G到M中执行。这里有个小细节:同时,每个P会周期性的查看全局队列中的待运行协程G,防止全局队列中的G长时间得不到调度机会而饿死。为了防止GRQ里的G被"饿死"(因为M上的g0总是优先从LRQ取),调度器规定,每进行61次调度循环,就必须强制去下一次去grq取 。这样做是为了避免lrq过于繁忙,而导致grq中的g“饿死”。
如果换成 runtime 里的函数名来理解,这个流程基本就是:先在当前 P 上通过 runqget 拿 G,不够再去全局队列里 globrunqget,随后检查 netpoll,最后再进入 work-stealing,从其他 P 的本地队列里偷一半任务回来。这也是 findrunnable() 背后最核心的查找顺序。
提示
为什么P的逻辑不加在M上?
主要还是因为 M 其实是内核线程,内核只知道自己在跑线程,而golang的运行时(包括调度,垃圾回收等)其实都是用户空间里的逻辑。操作系统内核哪里还知道,也不需要知道用户空间的golang应用的内部。这一切逻辑交给应用层自己去做就好,毕竟改内核线程的逻辑也不合适啊。
📚 GMP 生态圈
在Go的世界里,GMP是绝对的基石。所有上层的建筑,比如内存管理、并发工具等,都是围绕着GMP模型来精心设计的。
🧮 内存管理
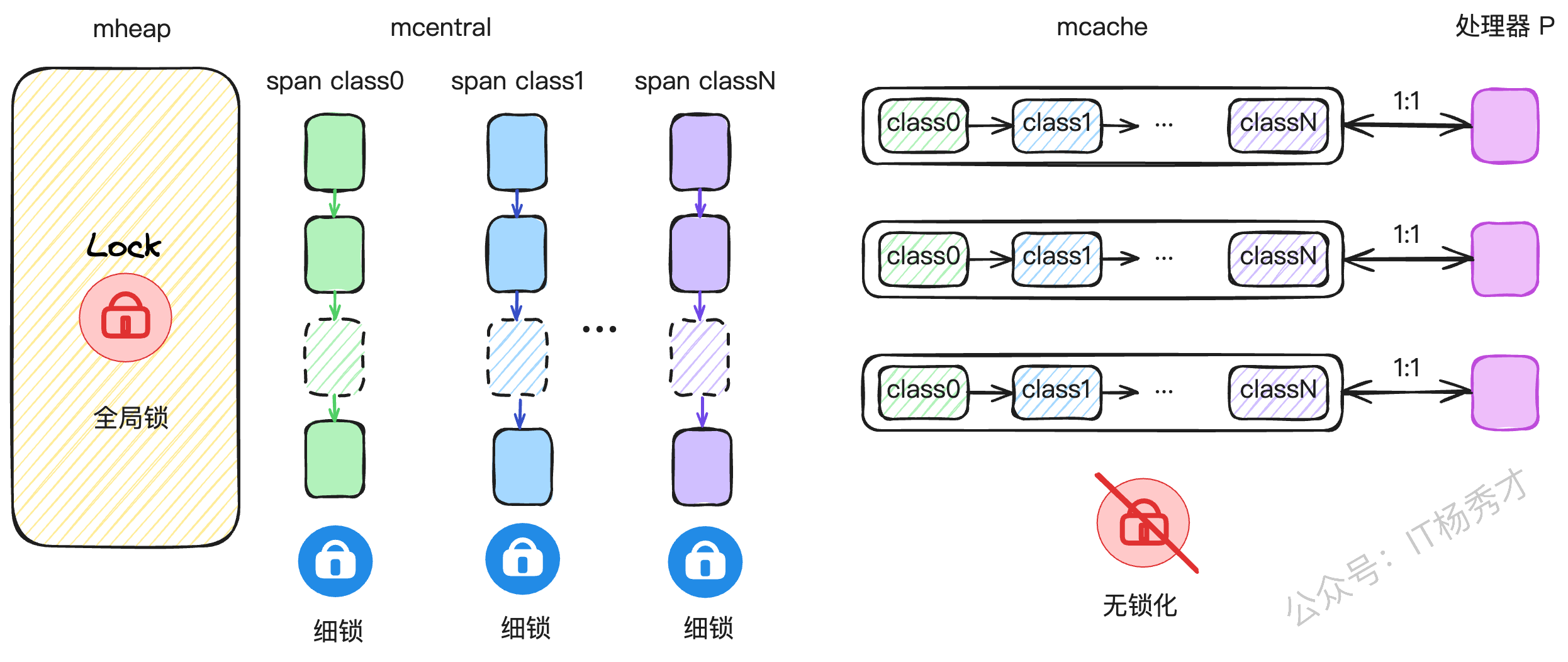
Go的内存管理借鉴了Google自家的TCMalloc思想,并为GMP模型量身定做了优化。它为每个P都配备了一个私有的内存缓存——mcache。当一个P上的G需要分配小对象时,可以直接从这个私有的mcache里拿,完全无锁,速度飞快。
🔒 并发工具(Mutex, Channel)
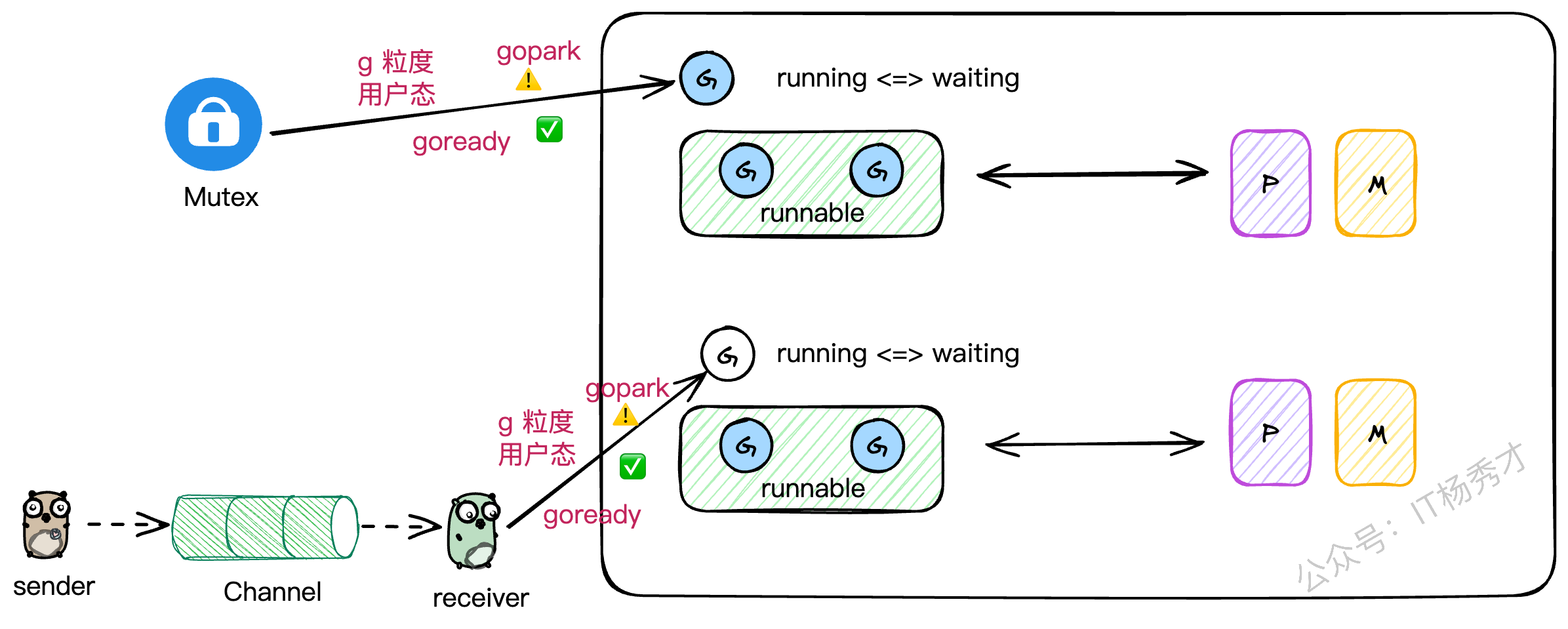
你有没有想过,为什么在Go里一个channel的读写阻塞了,或者一个Mutex锁住了,并不会把整个线程都卡死?
这就是因为Go的并发工具都是"G级别"的。当一个G因为这些操作需要阻塞时,它会被挂起,让出M的执行权。M会立刻去寻找并执行其他的G,整个过程都在用户态完成,无需内核介入。这极大地提升了并发性能。
我最近在用C++尝试模拟GMP时,就深有感触。C++标准库里的锁,一旦锁住,阻塞的是整个线程,这会导致线程上所有其他的协程都得干等着。想要实现Go这种效果,就得重写所有并发工具,成本巨大。这也反向证明了Go在并发设计上的优越性。
🌊 IO 多路复用(netpoll)
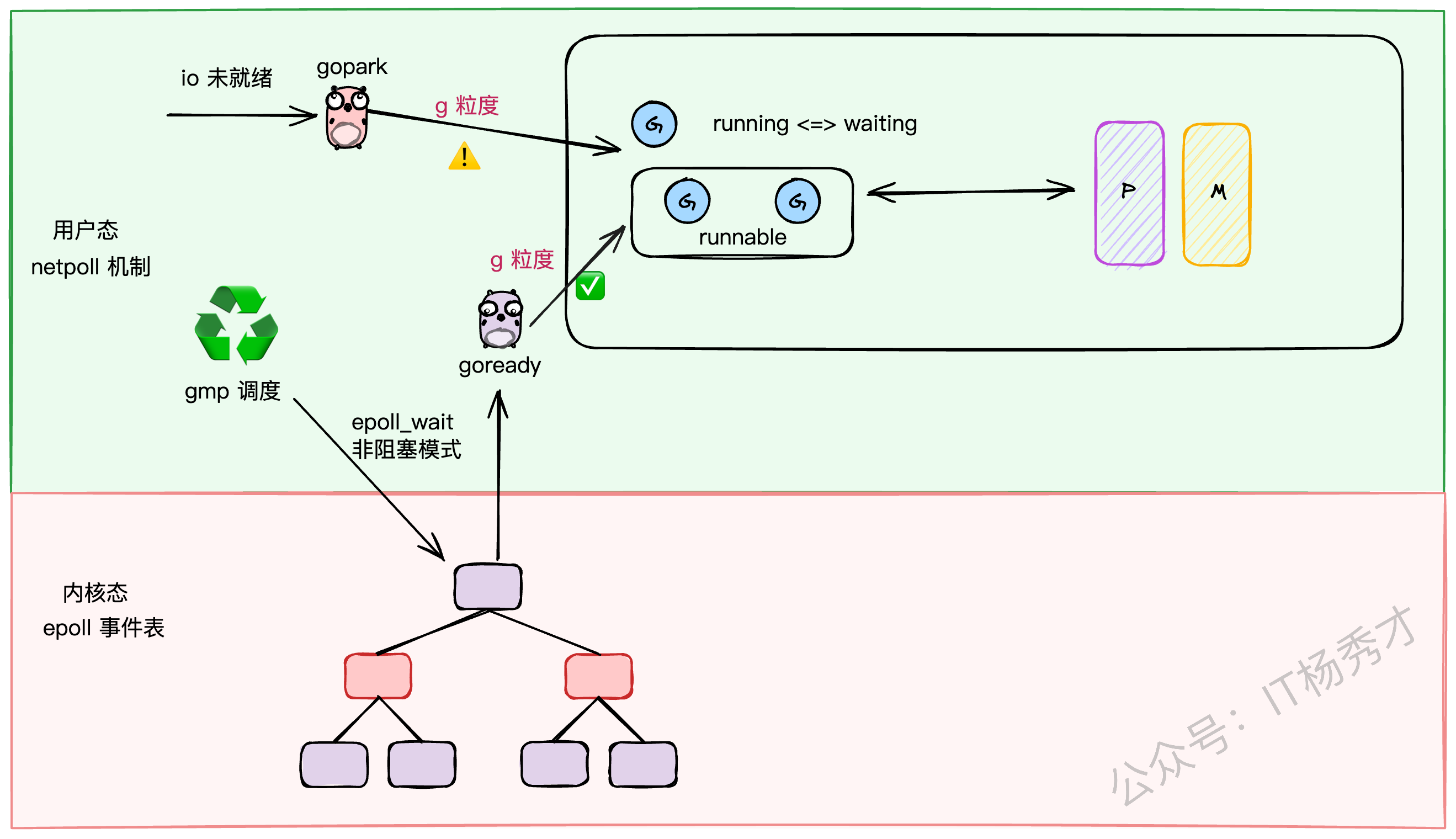
对于网络IO,Go采用了Linux下性能强悍的epoll技术。但为了避免epoll的等待操作阻塞整个M,Go设计了一套巧妙的netpoll机制。它将IO阻塞操作转换成了G级别的阻塞(gopark),当IO就绪时,再通过goready唤醒对应的G。这样,IO操作也被完美地融入了GMP的调度体系中。
可以说,不理解GMP,就无法真正理解Go语言的精髓。
🔬 深入源码:GMP 的底层结构
理论说了一大堆,我们现在就潜入源码,看看G、M、P在 runtime/runtime2.go 文件里到底长什么样。
🧩 G 的结构(goroutine)
g结构体是goroutine的实体,我们来看看它的关键字段:
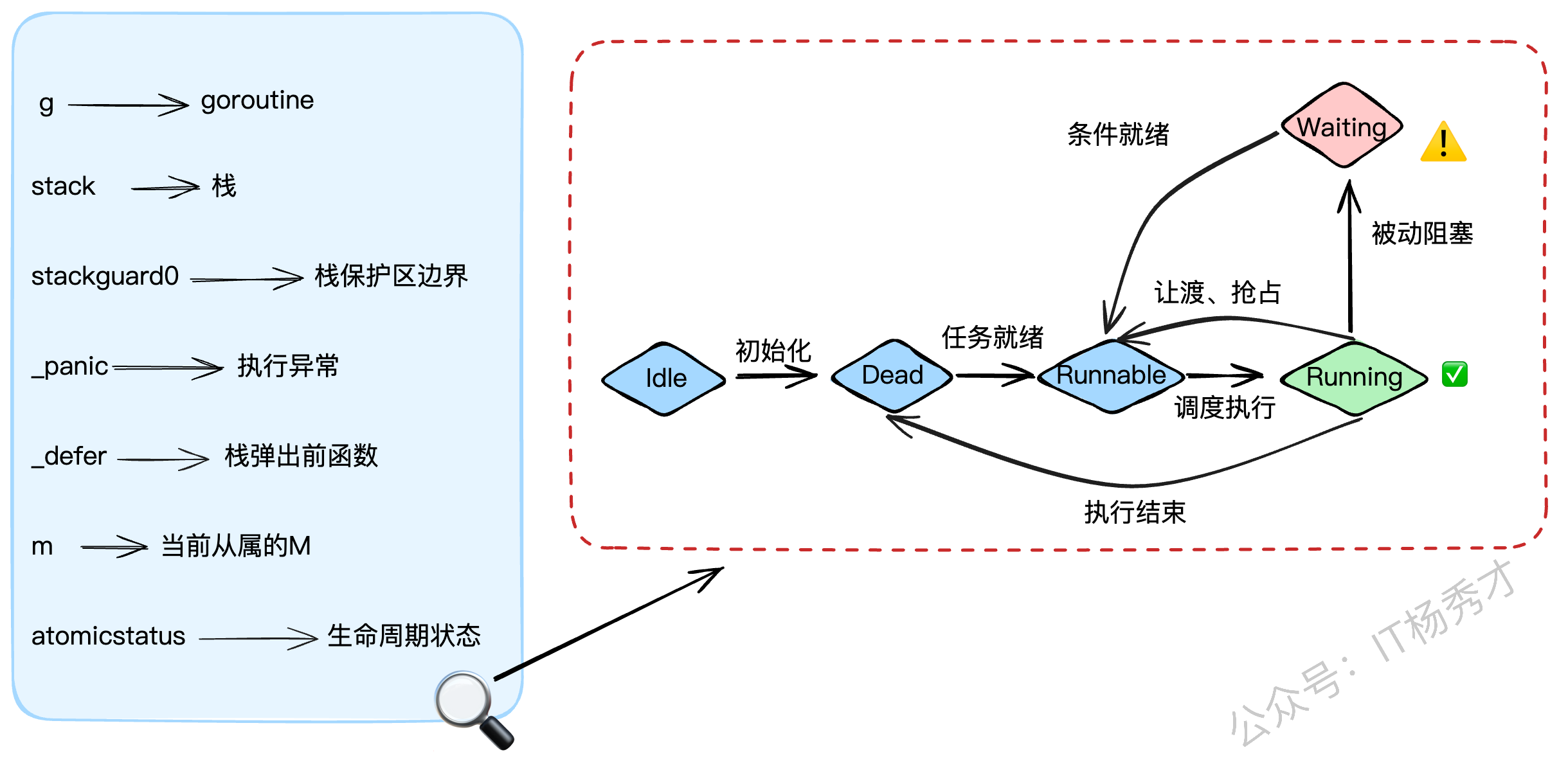
stack: 描述了goroutine的栈空间信息(起始和结束地址)。stackguard0: 栈的警戒线。当goroutine的栈使用量将要越过这条线时,就会触发栈扩容。同时,它也被用来标记"抢占请求"。_panic: 用来记录goroutine中发生的panic。_defer: 用链表的形式存储了goroutine中的defer操作(后进先出)。m: 指向当前正在执行它的M。如果G没在运行,这个字段就是nil。atomicstatus: G的生命周期状态,比如_Gidle、_Grunnable、_Grunning、_Gwaiting等。
🔌 M 的结构(Machine)
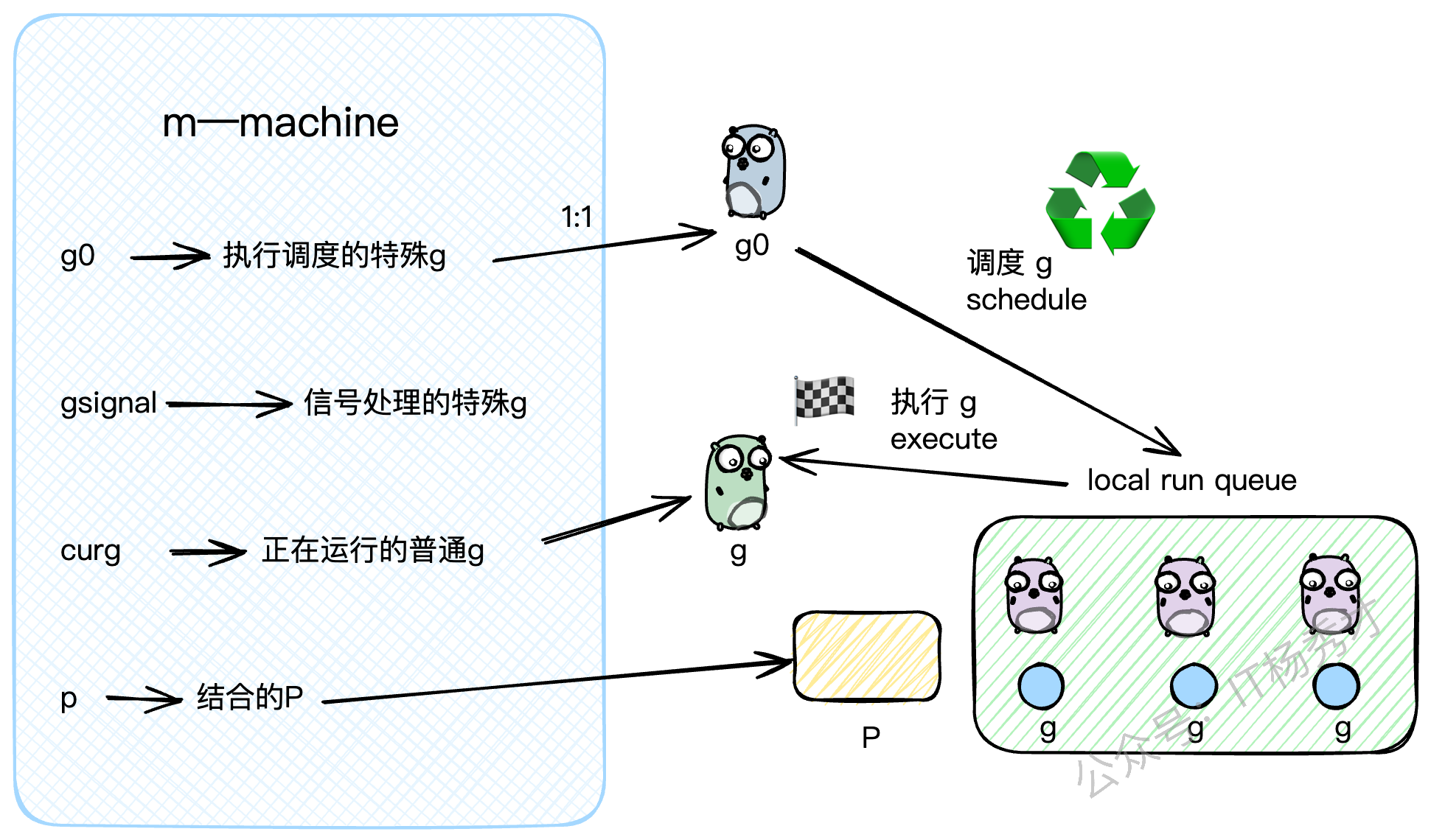
m结构体是内核线程的抽象,核心字段如下:
g0: 一个非常特殊的G。每个M都有一个自己的g0,这个g0不执行用户代码,它的任务就是执行调度逻辑,为M寻找下一个要运行的普通G。gsignal: 另一个特殊的G,专门用来处理分配给这个M的信号。curg: 指向当前M上正在运行的那个普通的用户G。p: 指向当前与M绑定的P。
你可以把M的运行过程想象成两个状态的切换:当它在执行 g0 时,它在扮演"调度者"的角色;当它在执行 curg 时,它在扮演"执行者"的角色。
📦 P 的结构(Processor)
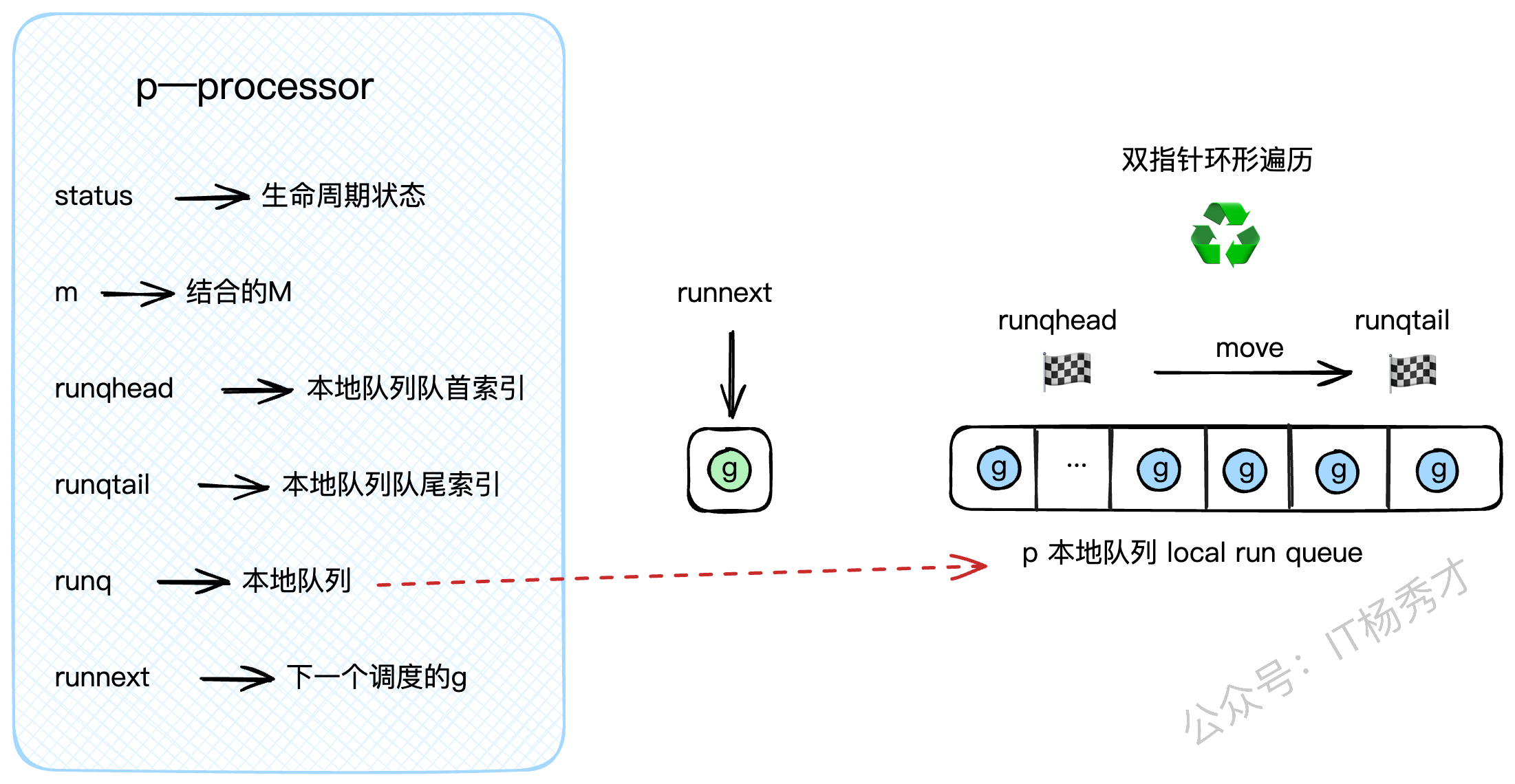
p结构体是调度器,是连接G和M的桥梁,核心字段如下:
status: P的生命周期状态,如_Pidle、_Prunning等。m: 指向当前与它绑定的M。runq: P的私有G队列,也就是我们前面说的LRQ,它是一个定长的数组,可以存放256个G。runqhead,runqtail: LRQ的头尾索引,用来实现一个环形队列。runnext: LRQ里的一个"VIP通道"。通过runqput放入的下一个G会优先放在这里,调度器会首先检查runnext是否有G,有的话直接拿来执行,可以省去操作runq队列的开销。
📋 全局调度器(schedt)
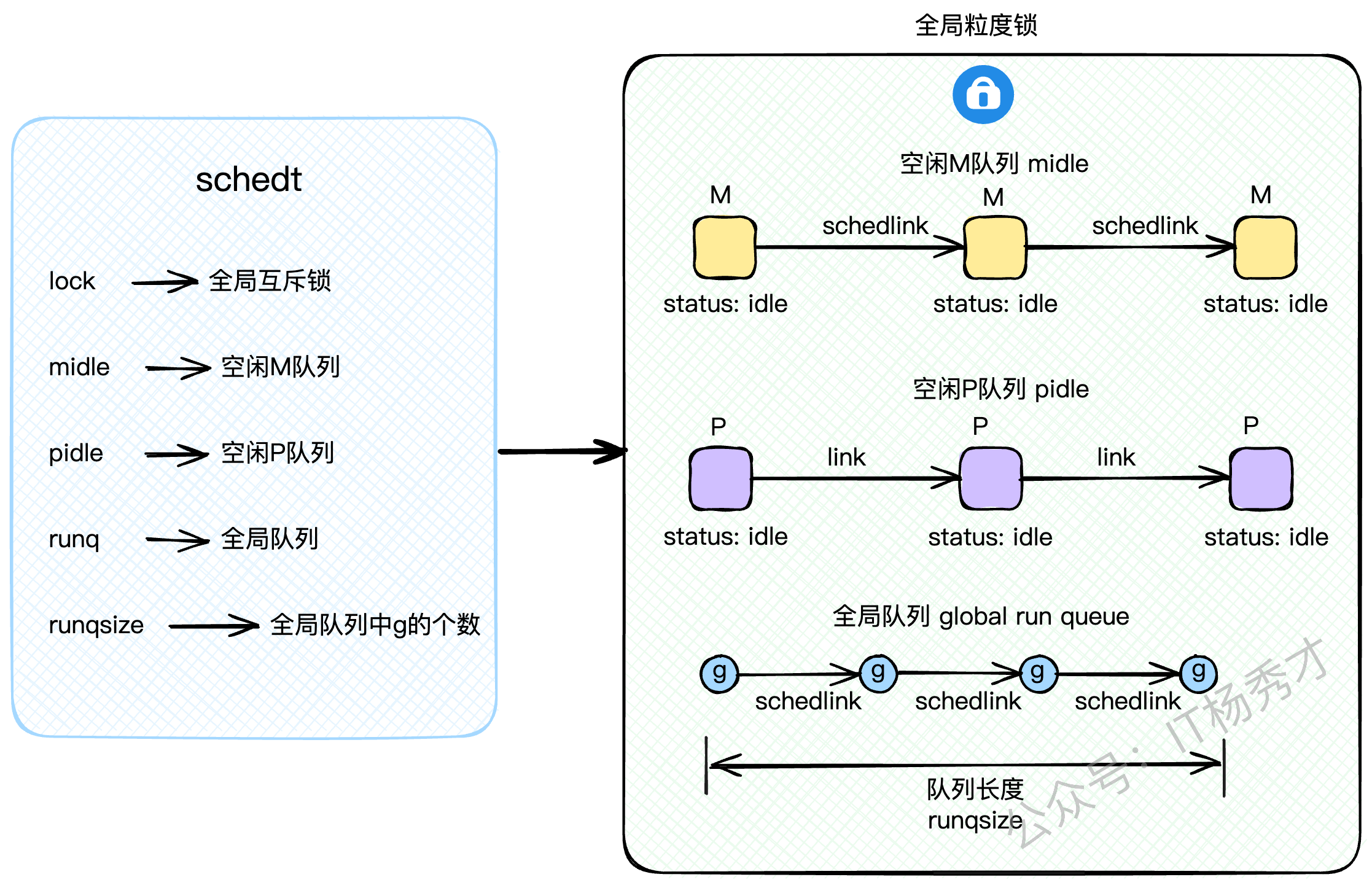
除了G、M、P这三大组件,还有一个全局的 schedt 结构体,它掌管着全局资源,访问它需要加锁。
lock: 全局互斥锁。midle: 空闲的M队列,没活干的M会在这里排队。pidle: 空闲的P队列,没活干的P也在这里排队。runq: 全局G队列,也就是GRQ。runqsize: GRQ里G的数量。
midle和pidle`的设计是为了资源的复用和节能。当系统不忙时,空闲的M和P会被放进这两个队列里"休眠",避免CPU空转,等到有新任务时再被唤醒。
🔍 正向追踪:一个 G 的诞生与调度
好了,基础结构我们都看完了。现在,让我们切换到第一人称视角,看看一个我们用 go func(){...} 创建的goroutine,是如何一步步被调度并执行的。这个过程,可以看作是从 g0到 g的转换。
🎯 main 函数的特殊性
main函数是所有Go程序的入口,它比较特殊。它是由一个全局唯一的 m0(主线程)来执行的。源码位于 runtime.proc.go
| |
🐣 普通 G 的创建
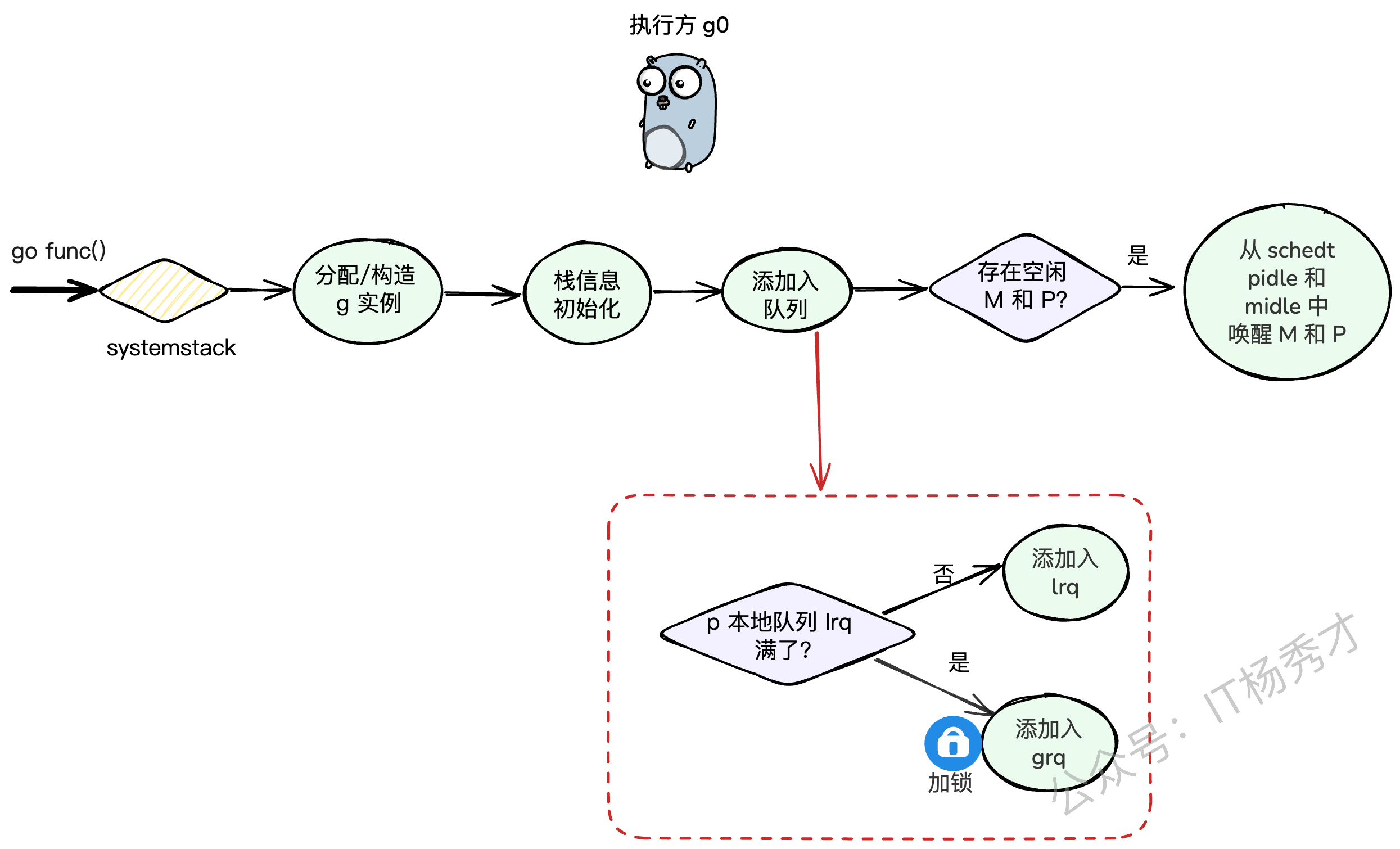
除了main这个特例,我们自己启动的goroutine都会经历一个标准的创建流程。比如这段代码:
| |
| |
🔁 从 g0 到 g 的切换

每个M都有一个自己的g0,g0的工作就是不断地调用schedule函数来寻找可执行的G。所以,一个M的生命周期,就是在执行g0(找任务)和执行普通g(做任务)之间循环往复。
这个切换过程有两个关键的”桩函数”:
mcall,systemstack: 实现从g切换到g0。gogo: 实现从g0切换到g。
| |
从栈切换角度看,mcall() 和 gogo() 并不是简单的函数调用,而是在用户 G 的栈和 g0 的调度栈之间切换 SP、PC 等寄存器,并把现场保存在 gobuf 里。也正因为如此,调度器既能安全地离开当前 G,又能在将来准确恢复到它之前停下的位置。
🔎 寻找 G 的漫漫长路:findrunnable
findrunnable是调度循环中最核心的函数,它寻找G的策略体现了Go调度器的智慧。
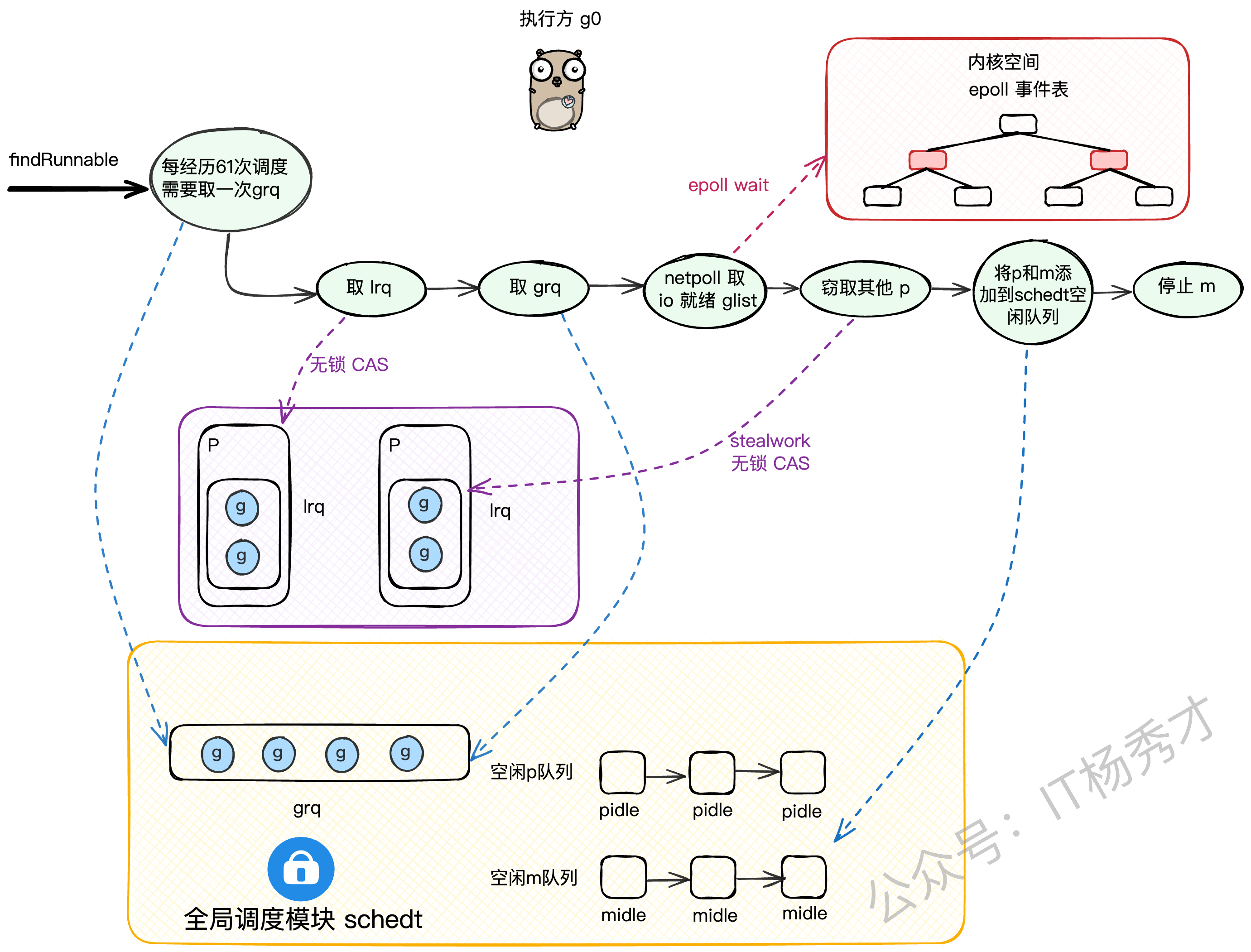
我们来梳理一下它的寻找步骤:
检查全局队列(GRQ):还记得吗?每61次调度循环,必须先从全局队列
globrunqget拿一个G,防止GRQ饥饿。(需要加锁)检查本地队列(LRQ):从当前P的LRQ里
runqget一个G。(无锁CAS)再次检查全局队列(GRQ):如果本地没有,再去全局队列里
globrunqget找。(需要加锁)检查网络轮询器(netpoll):如果还没有,就去
netpoll里看看有没有因为网络IO就绪的G。(非阻塞模式)从别的P偷(work stealing):如果还找不到,就只能启动
work stealing机制,随机找一个别的P,从它的LRQ里偷一半的G过来。再次double check全局队列:偷完之后,再最后看一眼全局队列。
进入休眠:如果以上所有努力都失败了,说明系统现在真的很闲,
findrunnable会:把当前的P设置为
_Pidle状态,并把它放到全局的pidle队列里。在把当前M也休眠之前,会做最后一次挣扎:以阻塞模式调用
netpoll,看看能不能等到一个IO事件。如果连阻塞等待IO都没用,那就彻底死心了,把当前M也放到全局的
midle队列里,然后调用stopm让M休眠,交出线程控制权。
这个过程设计得非常精妙,既保证了任务获取的高效性(优先无锁操作),又实现了负载均衡(work-stealing),还能在系统空闲时自动缩容,节省资源。
📖 findRunnable 函数详解
Go调度器的核心在于findRunnable函数,这个函数负责为当前的处理器P找到一个可执行的goroutine。整个过程遵循着严格的优先级顺序,确保系统的公平性和效率。
📍 本地队列获取策略
从本地队列获取goroutine是最高效的方式,因为不需要加锁。runqget函数采用了巧妙的双重策略:
⚖️ 全局队列的公平调度
当本地队列为空时,调度器会转向全局队列。但这里有个重要的防饥饿机制:
| |
🌐 网络 I/O 事件处理机制
在 gmp 调度流程中,如果 lrq 和 grq 都为空,则会执行 netpoll 流程,尝试以非阻塞模式下的 epoll_wait 操作获取 io 就绪的 g。该方法位于 runtime/netpoll_epoll.go:
| |
这个机制让Go程序能够高效处理大量并发连接,而不需要为每个连接分配单独的线程。
🥷 从其他的 P 队列窃取 G
当本地队列和全局队列都为空时,并且执行完 netpoll 流程后仍未获得 g,则会尝试从其他 p 的 lrq 中窃取半数 g 补充到当前 p 的 lrq 中。工作窃取算法是负载均衡的关键,它确保了系统中的处理器都能保持忙碌状态。
再执行完上述逻辑之后,如果还是未能获取到可运行的g,系统需要妥善处理空闲的P和M,此时会将 p 和 m 添加到 schedt 的 pidle 和 midle 队列中并停止 m 的运行,避免产生资源浪费
| |
🔙 逆向追踪:G 的让渡艺术
有借有还,再借不难。G拿到了M的执行权,也得在适当的时候还回去。这个"还"的过程,我们称之为让渡(yield)。让渡是一个主动的行为,由G自己发起,目的是把执行权交还给g0,让g0可以去调度其他的G。这是一个从 g 到 g0 的转换。
🏁 功成身退:执行结束
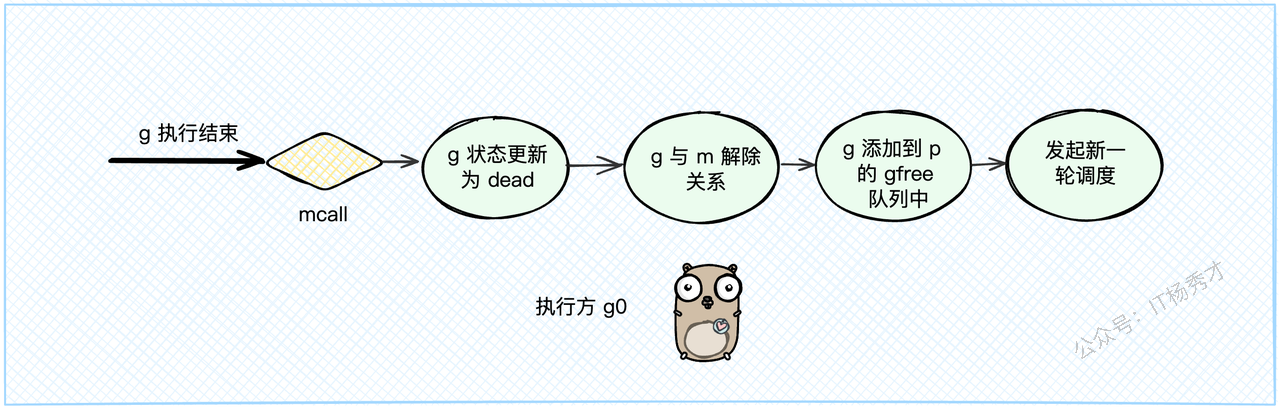
当一个G的任务执行完毕,它会调用goexit1,这是一个主动的"退休"申请。
在
goexit1里,它会调用mcall(goexit0),这个mcall指令会把执行权从当前的G切换到M的g0上,并让g0去执行goexit0函数。goexit0函数(此时由g0执行)会负责给这个退休的G办"后事":把G的状态从
_Grunning更新为_Gdead。清理G内部的数据。
解除G和M的绑定关系(
dropg)。把这个G的结构体放到P的
gfree队列里,方便下次创建新G时复用,避免了内存的反复申请和释放。最后,调用
schedule(),开始新一轮的调度。
| |
🤝 高风亮节:主动让渡
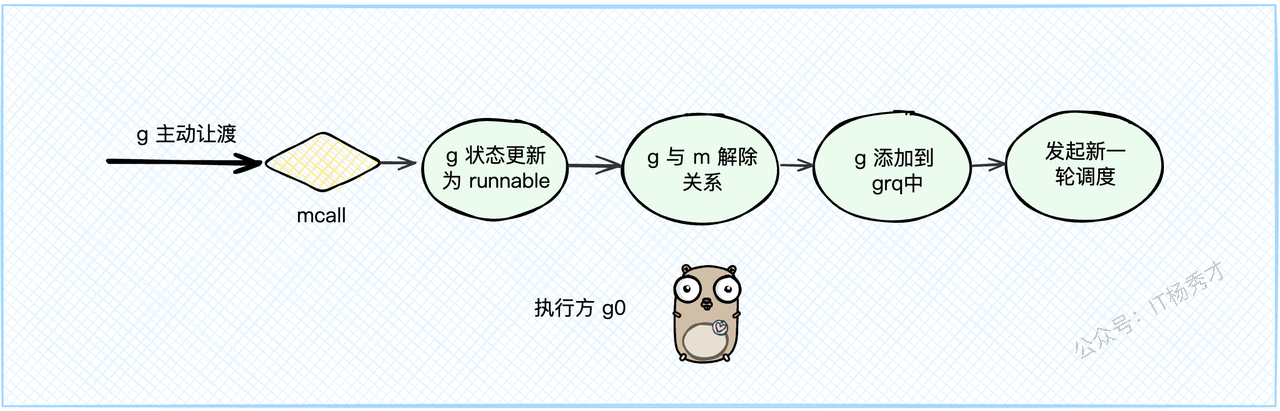
我们可以通过在代码里调用 runtime.Gosched() 来手动让一个G让出CPU。这个函数会做和goexit1类似的事情:
这是最常见的一种让渡方式。当G执行到需要等待某个外部条件的地方(比如读一个空的channel,或者等待一个锁),它就会被阻塞。
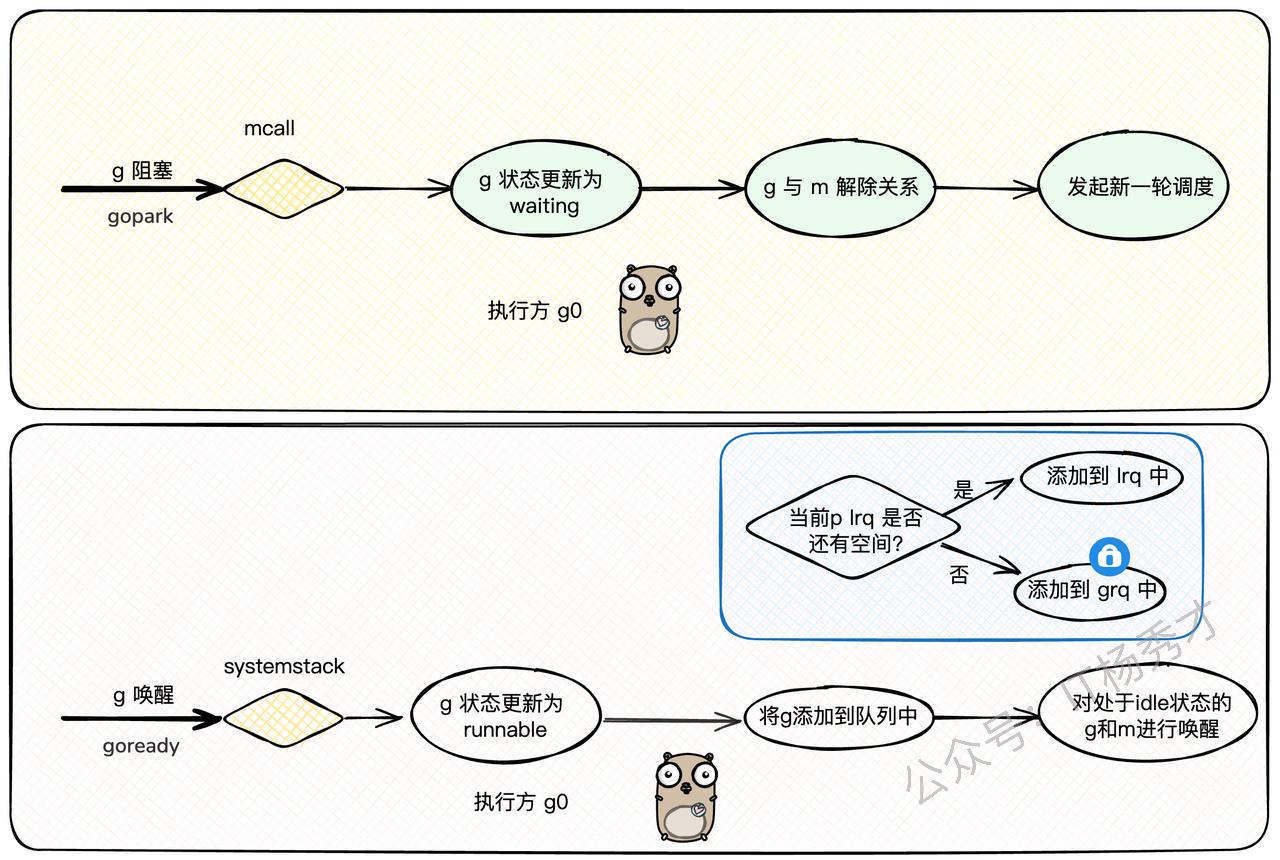
这个过程的核心是gopark函数:
当G需要阻塞时,上层函数(比如channel的读写逻辑)会调用
gopark。gopark同样会调用mcall(park_m),把执行权交给g0。g0执行park_m,它会:把G的状态从
_Grunning改为_Gwaiting。解除G和M的绑定。
注意:
_Gwaiting状态的G不会被放到任何就绪队列里!它会被上层调用者(比如channel)自己保管。g0调用schedule(),寻找下一个G来执行。
当外部条件满足时(比如channel里有了数据),另一个G会调用goready函数来唤醒这个处于_Gwaiting状态的G。
goready会:
把目标G的状态从
_Gwaiting改回_Grunnable。调用
runqput,把这个G重新放回到就绪队列(LRQ或GRQ)中。调用
wakep,尝试唤醒一个空闲的P来处理这个刚被唤醒的G。
这一park一ready,完美地实现了G级别的阻塞和唤醒,整个过程高效且对用户透明。
以下是具体的代码分析:
| |
与 gopark 相对的,是用于唤醒 g 的 goready 方法,其中会通过 systemstack 压栈切换至 g0 执行 ready 方法——将目标 g 状态由 waiting 改为 runnable,然后添加到就绪队列中.
| |
| |
⚡ 第三方视角:抢占式调度
前面说的"让渡"都是G的主动行为。但如果一个G是个"老赖",执行一个超长的计算任务,一直不主动让出CPU怎么办?难道要让整个系统都等它一个吗?
当然不行!Go调度器还有一个"霸道总裁"的角色来强制干预,就是抢占(Preemption)。一个由外部力量发起的、为了维护整个系统公平和效率的"强制让位"过程。
hand off机制 :将发起 syscall 的 g 和 m 绑定,但是解除 p 与 m 的绑定关系,使得此期间 p 存在和其他 m 结合的机会。保证这个 P 上的 G 还能继续被执行。
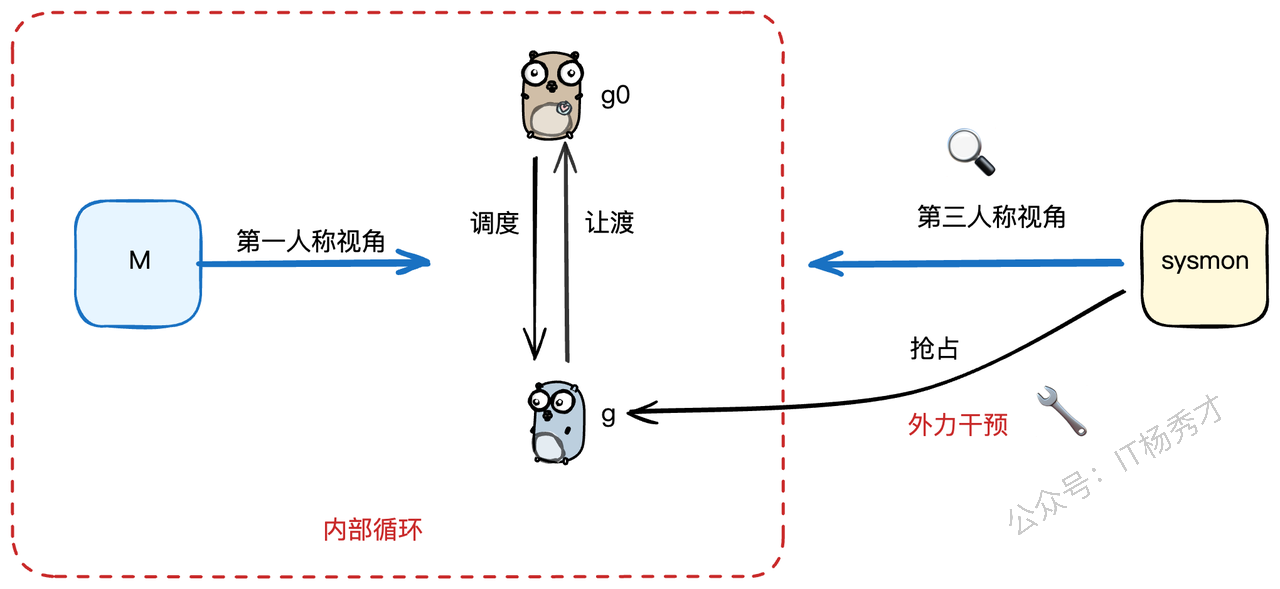
🛰️ 幕后英雄:无处不在的 sysmon
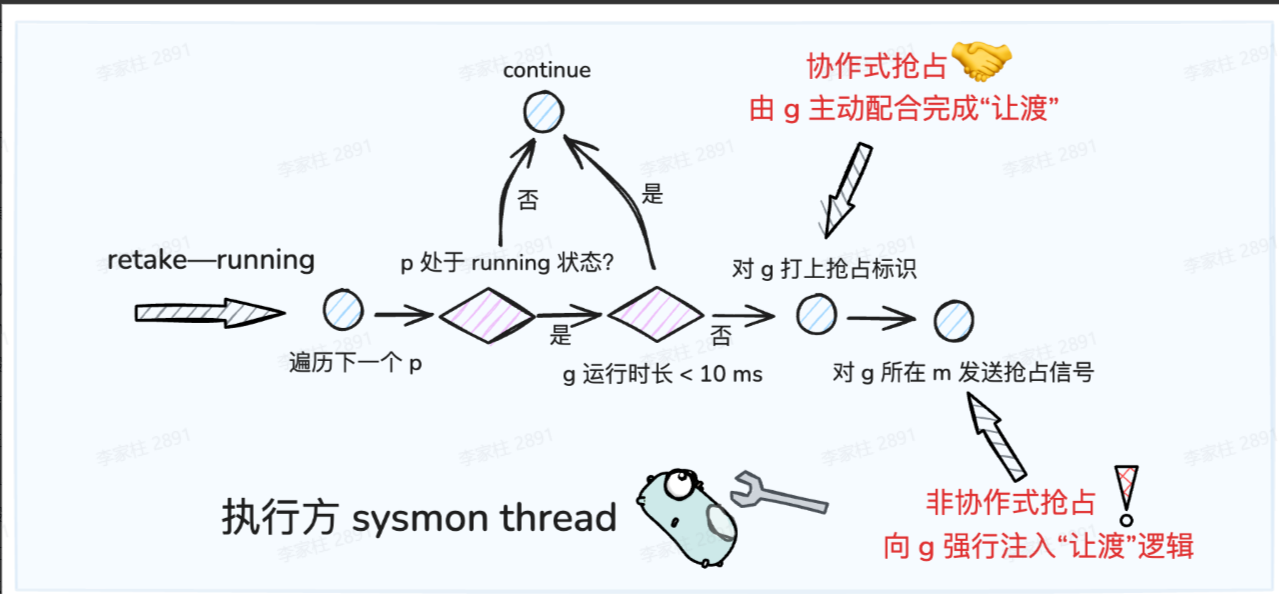
| |
可以看到,sysmon 的核心就是一个 for 死循环,每次循环都会执行一遍它的"三板斧"。而我们的抢占逻辑,就藏在 retake 这个函数里。retake 会根据Goroutine的不同状态,采取不同的抢占策略,主要分为两种:系统调用抢占和运行超时抢占。
📞 系统调用抢占
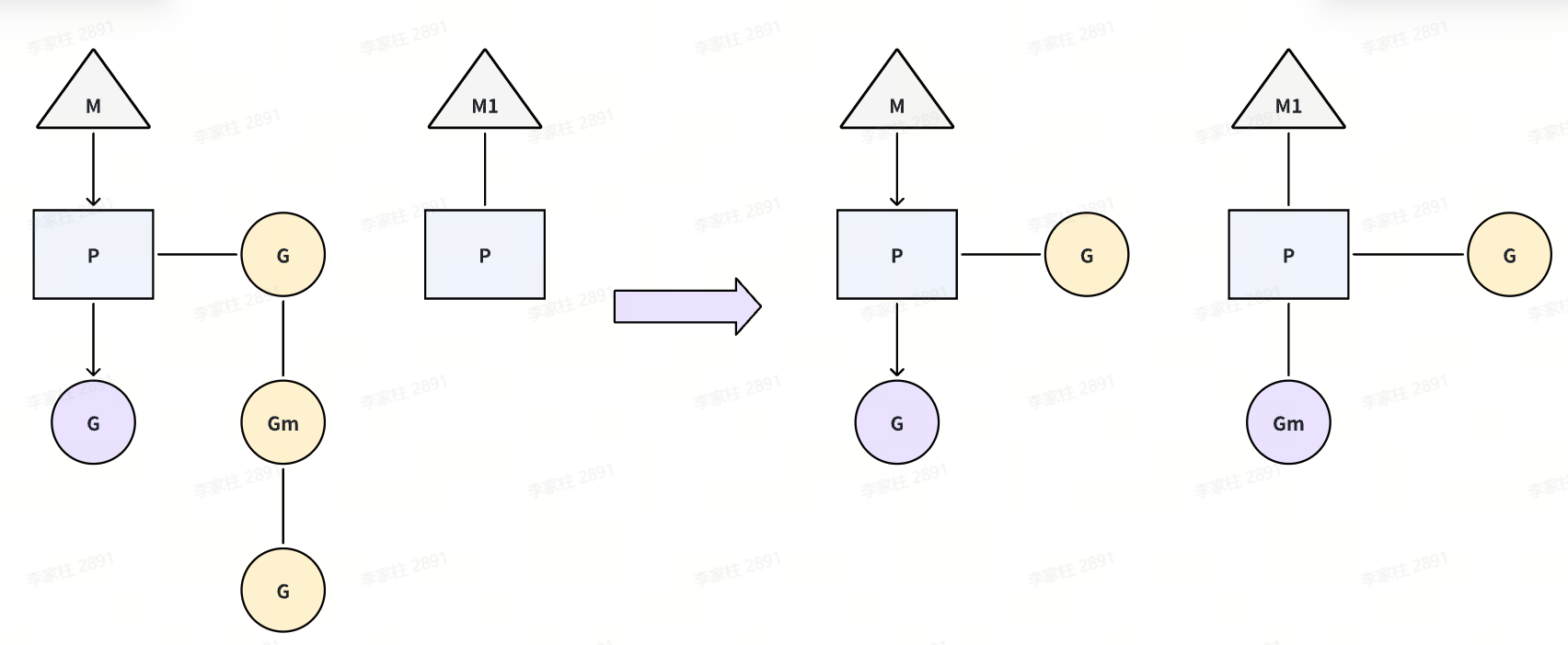
我们知道,系统调用(syscall)是连接用户态程序和操作系统内核的桥梁。但当一个M(系统线程)陷入系统调用时,它就会被操作系统挂起,暂时无法执行任何用户态代码。这对Go的调度器来说是个大问题,因为如果M上还绑定着一个P(处理器),那这个P也就跟着被闲置了,它所管理的本地Goroutine队列就得不到执行,造成了资源浪费。
Go的策略非常聪明:人走可以,但办公桌得留下!
当一个Goroutine即将发起系统调用时,调度器会做几件事:
解除P与M的绑定:把当前线程M和处理器P分离开。
状态更新:把Goroutine和P的状态都更新为
_Gsyscall和_Psyscall。保留弱联系:虽然P和M分开了,但M会记住这个P(存放在
m.oldp),方便回来的时候能"再续前缘"。寻找新机会:脱离了M的P,可以去和其他空闲的M结合,继续执行其他Goroutine,一点都不耽误事儿。
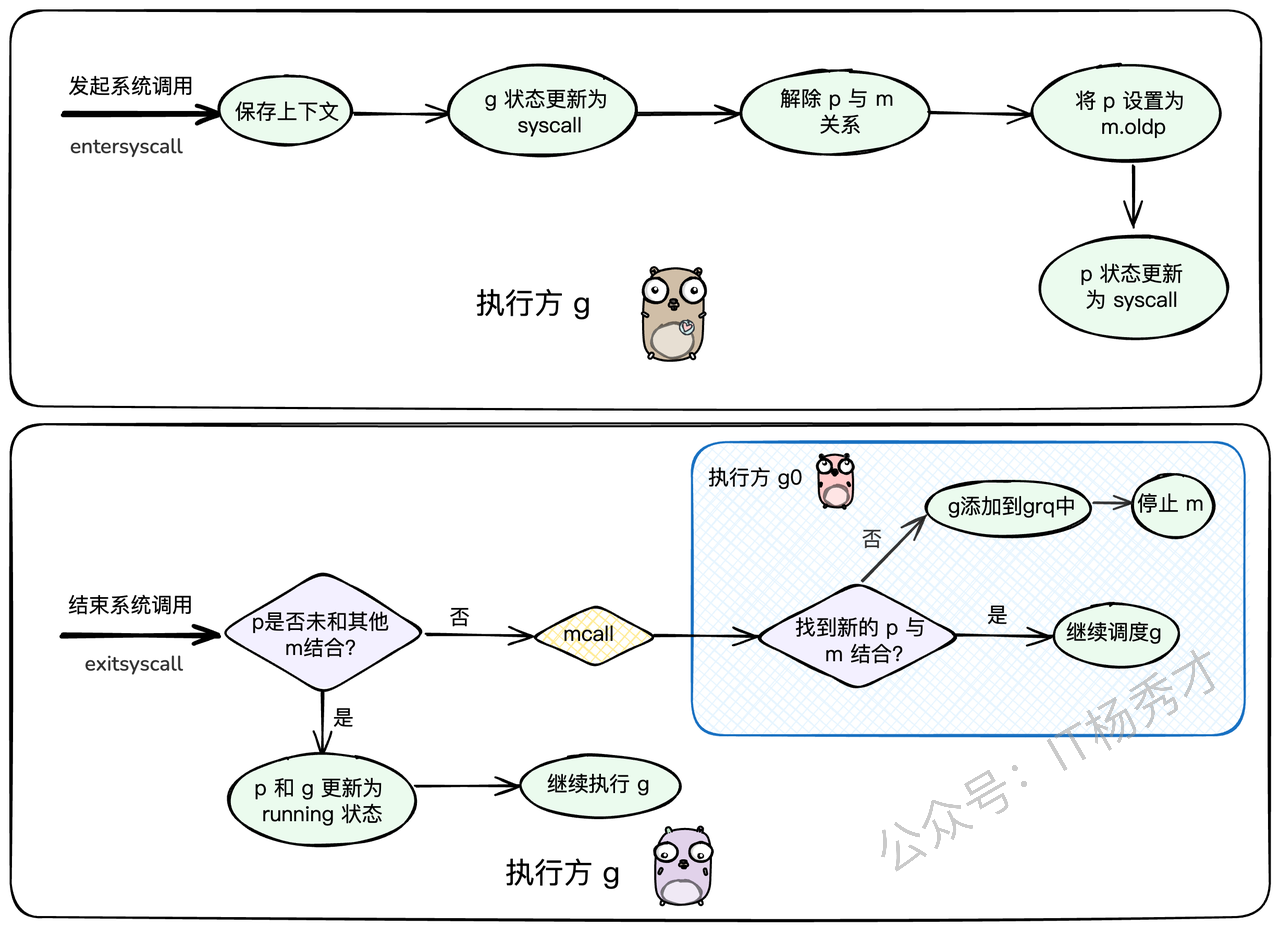
你可能会问,这和 sysmon 有什么关系?关系大了!sysmon 会在它的 retake 检查中,遍历所有的P。如果发现某个P长时间处于 _Psyscall 状态(默认超过10ms),或者这个P虽然在syscall,但它的本地队列里还有其他Goroutine在排队,sysmon 就会认为不能再等了,必须执行抢占。 它会调用 handoffp,强制把这个P从syscall的M那里"抢"过来,分配给一个新的或者空闲的M,去执行P本地队列里的其他任务。
| |
| |
⏱️ 运行超时抢占
除了系统调用,另一种需要抢占的场景就是Goroutine运行时间过长。比如一个纯计算的循环,没有任何IO或channel操作,它就会像个"钉子户"一样霸占着CPU。
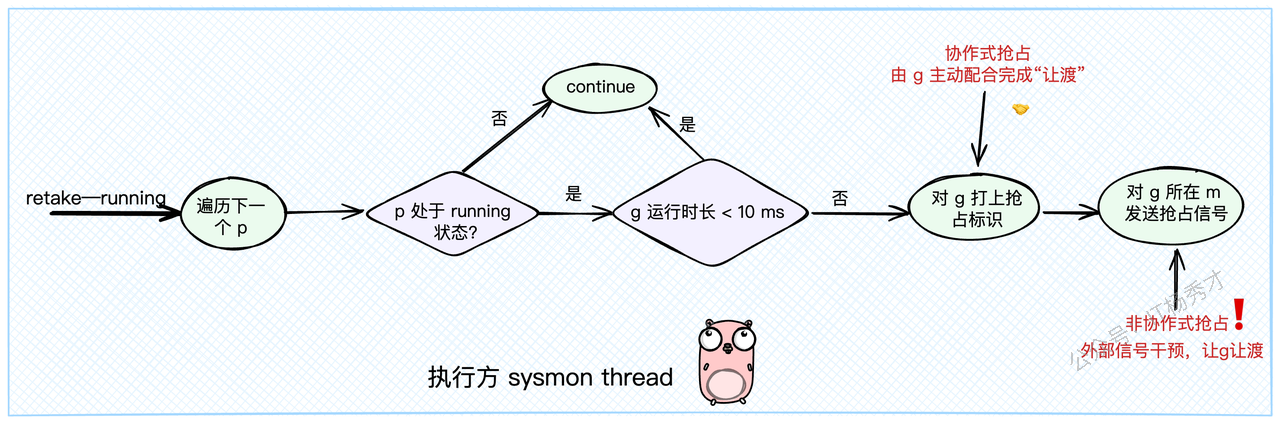
sysmon 在 retake 函数中同样会检查每个处于 _Prunning 状态的P。它会看当前P上的Goroutine从何时开始执行(schedwhen),如果执行时间超过了一个阈值(forcePreemptNS,通常是10ms),sysmon 就会认为需要抢占了。
这是Go早期版本就有的抢占方式,比较"温柔"。sysmon 在决定抢占后,会调用 preemptone 函数。这个函数首先会给目标Goroutine打上一个"抢占标记"。具体来说,就是把 gp.preempt 设置为 true,同时把 gp.stackguard0 设置为一个特殊值 stackPreempt。
| |
这个 stackguard0 标志位非常关键。Goroutine在执行函数调用时,尤其是可能导致栈扩容的场景下,会检查这个标志位。当它发现 stackguard0 变成了 stackPreempt,就知道:“哦,调度器想让我让位了”。于是,它就会很"自觉"地停止当前工作,调用 gopreempt_m,将自己重新放回全局队列,让出CPU。这个过程就叫做协作式抢占。
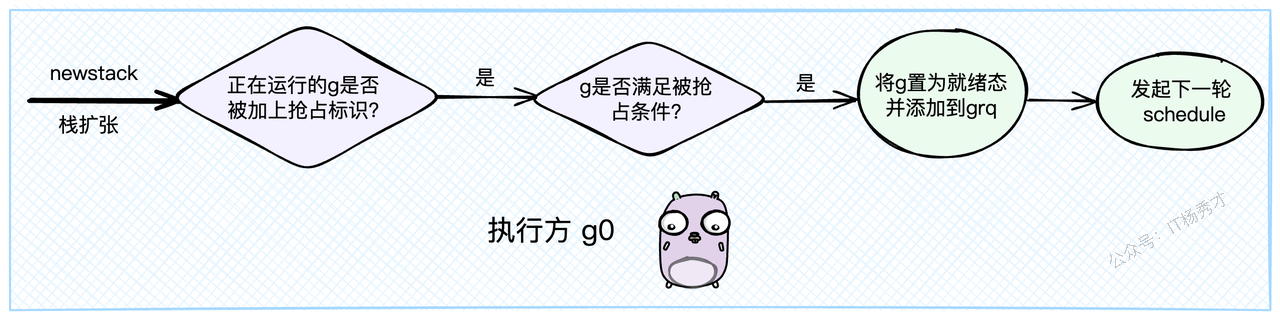
这个检查点通常在 newstack 函数中,也就是栈扩容的逻辑里:
| |
但协作式抢占有个明显的缺点:如果一个Goroutine是个铁憨憨,一直在执行纯计算的死循环,没有任何函数调用,那它就永远没有机会去检查 stackguard0,也就无法响应抢占意图。这可怎么办?
🚨 非协作式抢占
为了解决协作式抢占的短板,Go 1.14 版本引入了基于信号的抢占机制,也就是非协作式抢占。这种方式就非常"硬核"了。
在 preemptone 函数中,除了设置协作标记,还会做一件事:向目标Goroutine所在的M(线程)发送一个信号 sigPreempt。
| |
Go程序启动时,会注册一个信号处理器 sighandler 来处理各种信号,其中就包括了我们的 sigPreempt
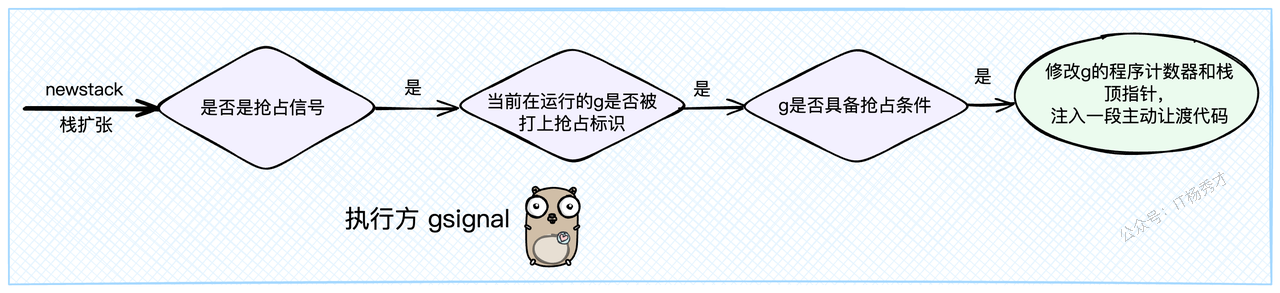
当M接收到 sigPreempt 信号后,操作系统会中断M的当前执行,转而去执行sighandler。 信号处理函数会发现这是一个抢占信号,然后检查当前的Goroutine是否满足被抢占的条件(例如,没有在执行一些敏感的运行时代码)。
如果条件满足,最关键的一步来了:sighandler会像一个黑客一样,直接修改G的寄存器信息,主要是程序计数器(PC)和栈顶指针(SP)。它会强行在G的执行流中"注入"一段代码,这段代码就是 asyncPreempt 函数。
| |
这样一来,当信号处理结束,G恢复执行时,它下一条要执行的指令不再是原来被打断的地方,而是被篡改为了 asyncPreempt 函数。这个函数会立即调用 mcall 切换到 g0 栈,执行 gopreempt_m,最终完成让渡操作,和协作式抢占殊途同归。
| |
至此,哪怕是最顽固的"钉子户"Goroutine,也会被这种强制手段给请下CPU,保证了调度器的公平性。
抢占是Go调度器为了公平和效率,由sysmon线程发起的强制性调度行为。
系统调用抢占:通过解绑P和M,让P可以继续服务其他Goroutine,避免因单个M阻塞导致整个P被浪费。
运行超时抢占:针对长时间运行的Goroutine,Go提供了两手准备:
协作式抢占:温柔地打个标记,让Goroutine在函数调用时"自觉"让出CPU。
非协作式抢占:对于不自觉的Goroutine,直接发送信号,通过修改PC和SP寄存器的方式,强行中断其执行,注入让渡逻辑。
正是有了这套精密的、软硬兼施的抢占机制,Go的并发调度才能如此健壮和高效,让我们能够放心地创建和使用海量的Goroutine。