🧠 为什么规划能力是Agent的核心
在聊具体方法之前,我们先要理解"规划"在Agent体系中扮演的角色。一个完整的Agent通常包含四大能力模块:感知(Perception)、规划(Planning)、记忆(Memory)和行动(Action)。其中规划是真正的"大脑",它决定了Agent面对一个复杂任务时,应该把任务拆解成哪些子步骤、以什么顺序执行、遇到问题时怎么调整策略。
如果没有规划能力,Agent就只能做简单的"一问一答"——用户说什么它就做什么,完全不具备处理多步骤复杂任务的能力。你可以把规划能力理解为Agent和普通Chatbot之间的分水岭:Chatbot是被动应答,Agent是主动规划并执行。
而赋予LLM规划能力的核心方法,本质上都是在回答同一个问题:如何组织LLM的推理过程,使它能够系统地分解和解决复杂问题? 不同方法的区别在于,它们对"推理过程"的结构化程度不同——从最简单的线性链条,到树状分支,再到任意图结构,复杂度逐步递增,适用场景也各不相同。
🏗️ 面向 LLM 的推理方法:让模型"更会想"
🔗 Chain-of-Thought(CoT):线性链式推理
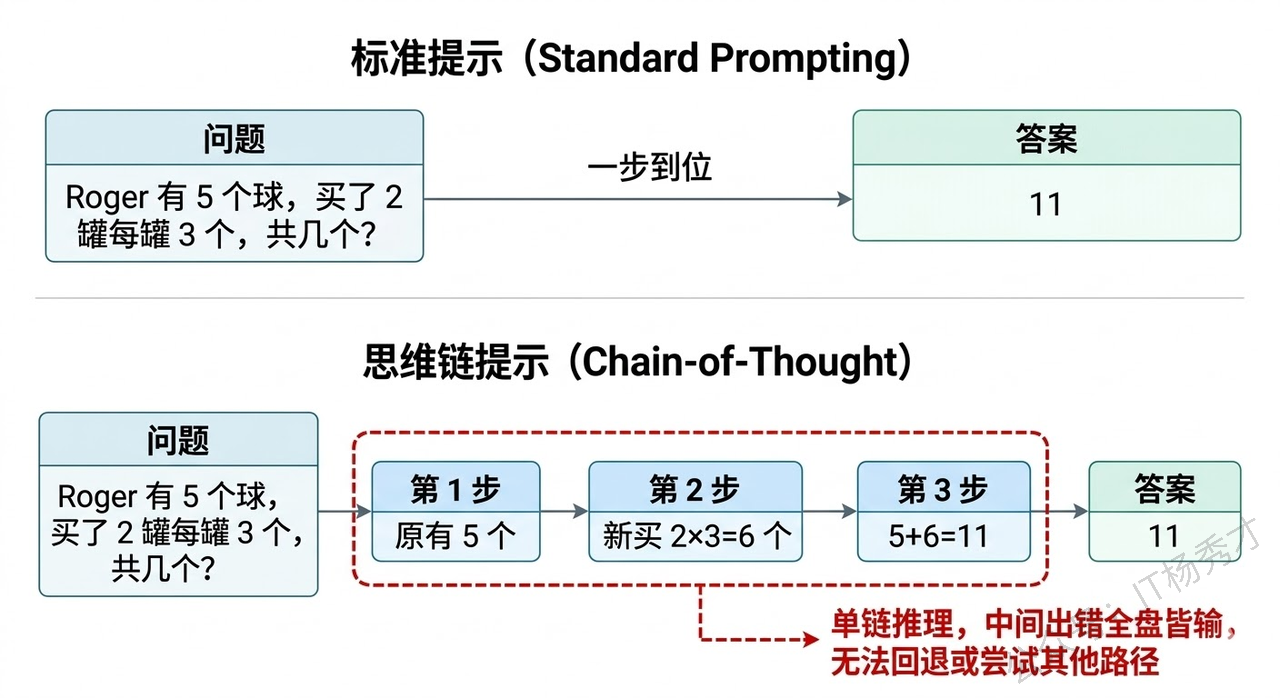
CoT是一切的起点,由Google在2022年的论文中正式提出。在CoT出现之前,我们让大模型回答问题的方式是"直接给答案",也就是所谓的Standard Prompting。比如问"Roger有5个网球,又买了2罐,每罐3个,他现在有多少个?",模型直接输出"11"。这种方式对于简单问题没问题,但遇到需要多步推理的问题就经常出错,因为模型被迫在一次前向传播中完成所有计算。
CoT的核心洞察非常简单但深刻:让模型把中间推理步骤显式地写出来。还是刚才那个问题,加上CoT之后模型会输出"Roger一开始有5个球,2罐每罐3个就是6个,5 + 6 = 11"。看起来只是多输出了几句话,但效果提升非常显著,因为每一步中间结果都变成了下一步推理的"垫脚石",大幅降低了推理难度。
CoT有两种主要的触发方式:
- Few-shot CoT:在prompt中给几个带推理过程的示例,模型就会"模仿"这种推理风格
- Zero-shot CoT:只需要在问题后面加一句"Let’s think step by step",模型就会自动展开推理链
这说明大模型内部其实已经具备了逐步推理的能力,CoT只是通过prompt把这个能力"激活"了。
但是CoT有一个本质局限:它的推理过程是单条链路的,线性的,不可回退的。模型从第一步开始,一步接一步地往下推,如果中间某一步推错了,后面所有步骤都会跟着错下去,没有任何"纠错"或"换条路试试"的机制。这对于只有一条正确推理路径的简单任务来说够用了,但对于有多种可能解法的复杂任务,就显得力不从心了。
🗳️ Self-Consistency:多条链路投票
在CoT的基础上,一个很自然的改进思路是:既然一条链可能走错,那我多生成几条链,最后投票选最靠谱的不就行了? 这就是Self-Consistency方法。
Self-Consistency的做法是:对同一个问题,让模型用CoT的方式生成多条不同的推理链(通过调高temperature来引入随机性),每条链都会得出一个最终答案,然后对所有答案进行多数投票,票数最多的答案作为最终输出。
这个方法的直觉来自于人类解题的经验——如果你用三种不同的方法解一道数学题,三种方法都得到了同一个答案,那这个答案大概率是对的。Self-Consistency用统计的方式提高了推理的鲁棒性,在数学推理和常识推理任务上效果很好。
但它的局限也很明显:多条链之间是完全独立的,不会互相交流信息。也就是说,如果第一条链在某一步发现了一个关键线索,第二条链在推理过程中完全用不到这个线索。每条链都是闷头自己推,最后只是在结果层面做投票聚合。这显然是一种浪费——理想情况下,我们希望不同推理路径之间能够共享中间信息、互相启发。
🌲 Tree-of-Thought(ToT):树状分支探索
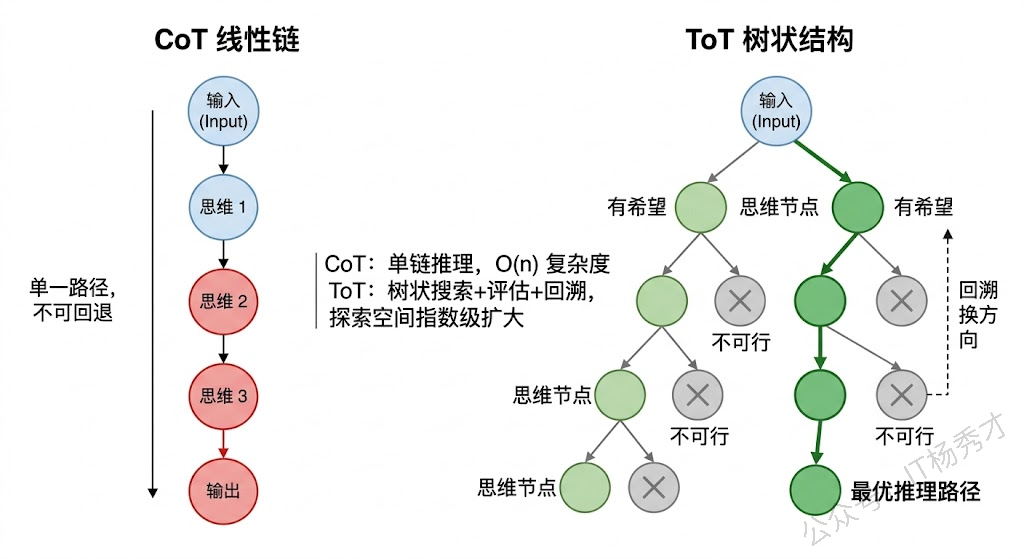
ToT就是为了解决CoT"一条路走到黑"和Self-Consistency"多条路互不相干"这两个问题而提出的。它由Yao等人在2023年的论文中正式提出,核心思想是:把推理过程从一条链变成一棵树,在每一步都可以产生多个分支候选,然后通过评估来选择最有希望的分支继续探索,必要时还可以回溯。
具体来说,ToT的工作流程是这样的:在推理的每一步,模型会生成多个可能的"思维节点"(Thought),每个节点代表一种可能的推理方向。然后,模型会对这些候选节点进行自我评估(Self-evaluation),判断每个方向的前景如何——是"很有希望"、“还行"还是"肯定不对”。基于评估结果,系统选择最优的一个或几个节点继续往下展开,形成新的分支。如果某个分支推着推着发现走不通了,还可以回溯到之前的节点,换一个方向继续探索。
这个过程本质上就是经典算法中的搜索——你可以用BFS(广度优先搜索)来逐层展开所有可能性,也可以用DFS(深度优先搜索)来沿着一个方向深入探索、走不通再回头。ToT把LLM的推理过程变成了一个可控的搜索问题。
用一个例子来说明ToT的威力。假设我们让模型做一个"24点游戏"——给定4个数字,用加减乘除组合成24。CoT可能一条路算下去,发现算不出来就卡住了。但ToT会在每一步尝试多种运算组合,评估哪些中间结果更有可能通向24,优先探索那些有希望的分支,走不通就回退换路,直到找到答案。
🧩 Graph-of-Thought(GoT):图结构的自由推理
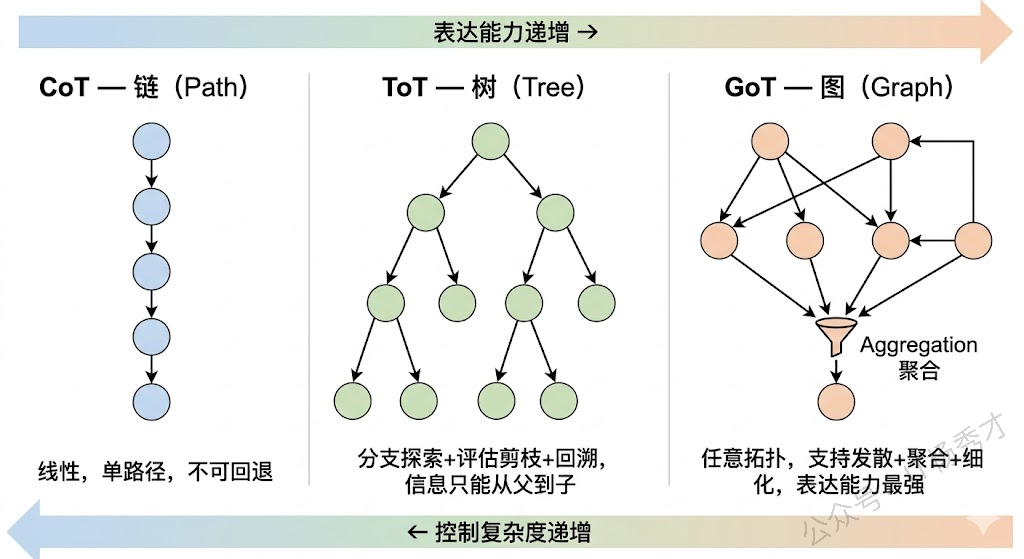
如果说CoT是一条线、ToT是一棵树,那GoT就是一张任意有向图。GoT由Besta等人在2023年提出,它进一步打破了树结构的层级限制,允许推理节点之间形成更自由、更复杂的连接关系。
GoT相比ToT最关键的新增能力是思维的聚合(Aggregation)。在树结构中,信息只能从父节点流向子节点,不同分支之间是隔离的。但在很多实际推理场景中,我们需要把多个分支的中间结论汇总合并成一个新的结论——这就要求不同分支之间能够"连线"。GoT通过引入聚合操作,允许多个思维节点的输出合并成一个新节点的输入,形成类似DAG(有向无环图)甚至包含环路的图结构。
举个例子:假设你要分析一篇长文档的核心观点。你可以先用不同的分支分别提取各段落的关键信息(这是ToT也能做的"发散"),然后把各段落的关键信息聚合成一个全局摘要(这是GoT独有的"收敛"),最后基于全局摘要再进一步推理。这种"先发散再收敛"的模式在树结构中是做不到的。
从图论的角度来看,CoT是一条路径(Path),ToT是一棵树(Tree),GoT是一张图(Graph)。路径是树的特例,树是图的特例,所以GoT在理论上的表达能力是最强的。但表达能力强也意味着搜索空间更大、控制更复杂,实际工程中需要更精细的调度策略。
⚙️ 面向 Agent 的控制策略:让系统“更会做”
除了上面这条"链→树→图"的主线是针对与大语言模型的规划增强策略,而下面几种方法是针对与Agent的规划增强策略。上面这一条“链 → 树 → 图”的演进脉络,本质上讨论的是 LLM 的推理结构。而在真实 Agent 系统中,仅仅“会想”还不够,Agent 还需要解决另一个问题:
推理、工具调用、执行、观察和修正,应该如何组织起来?
下面这些方法是面向 Agent 的规划与决策实施策略。
⚡ ReAct:边推理,边行动
ReAct是当前Agent工程里最具代表性的控制范式之一。它的全称是Reasoning + Acting,核心思想是:让大模型像人一样,边想边做。
ReAct(Reasoning + Acting)是当前 AI Agent 理论中最具基础性和代表性的范式,由 Shunyu Yao、Jeffrey Zhao 等于 2022 年在论文《ReAct: Synergizing Reasoning and Acting in Language Models》中提出。该范式已成为现代 AI 代理设计的基准,影响了后续框架如 LangChain 和 LlamaIndex。
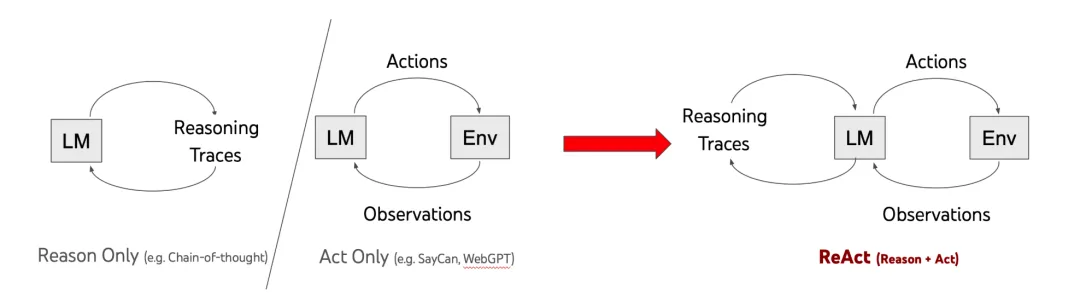
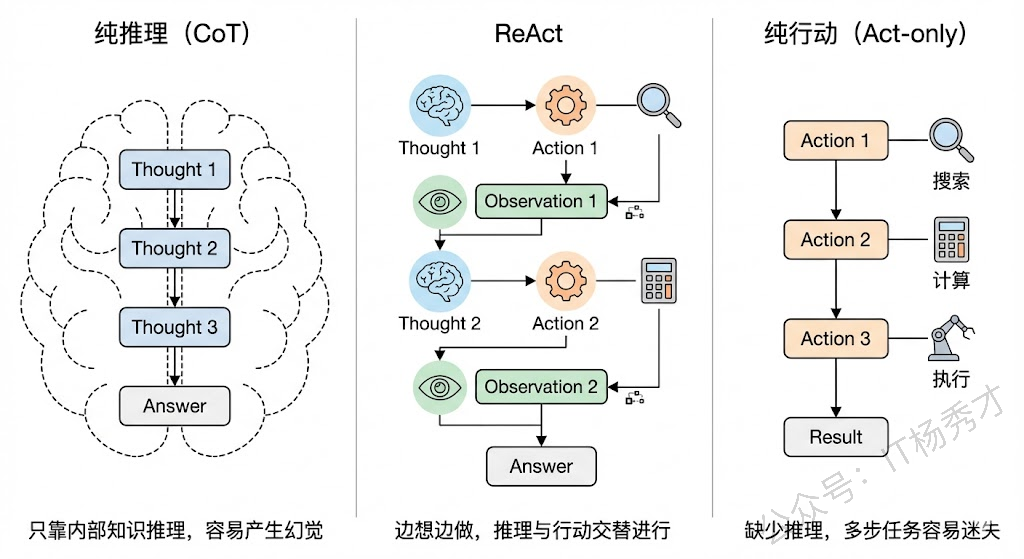
在ReAct出现之前,大模型处理复杂任务主要有两条路线:一条是以CoT为代表的纯推理路线,另一条是以WebGPT、SayCan等为代表的纯行动路线。
-
纯推理路线的问题在于,模型只能依赖自身内部的参数知识来一步步推导,一旦遇到需要实时信息、精确计算或者外部数据的场景,它就容易"幻觉"——比如问"今天北京天气怎么样",它没有联网能力,只能瞎编一个答案。
-
纯行动路线的问题则相反,模型直接映射到动作空间去执行操作,但缺少中间的推理过程,导致它不知道"为什么要做这个动作"、“做完之后下一步该怎么办”。
💡 ReAct的核心思想
ReAct的核心思想非常朴素:想一步、做一步、看一步,根据每一步的反馈来调整下一步的计划。ReAct就是把这个"交替进行推理和行动"的过程形式化了。将“思维链(CoT)推理”与“外部环境交互行动”相结合,弥补单纯 LLM 缺乏实时信息和容易产生幻觉的缺陷。通过交织推理和行动,ReAct 使模型生成更可靠、可追踪的任务解决轨迹,提高解释性和准确性。
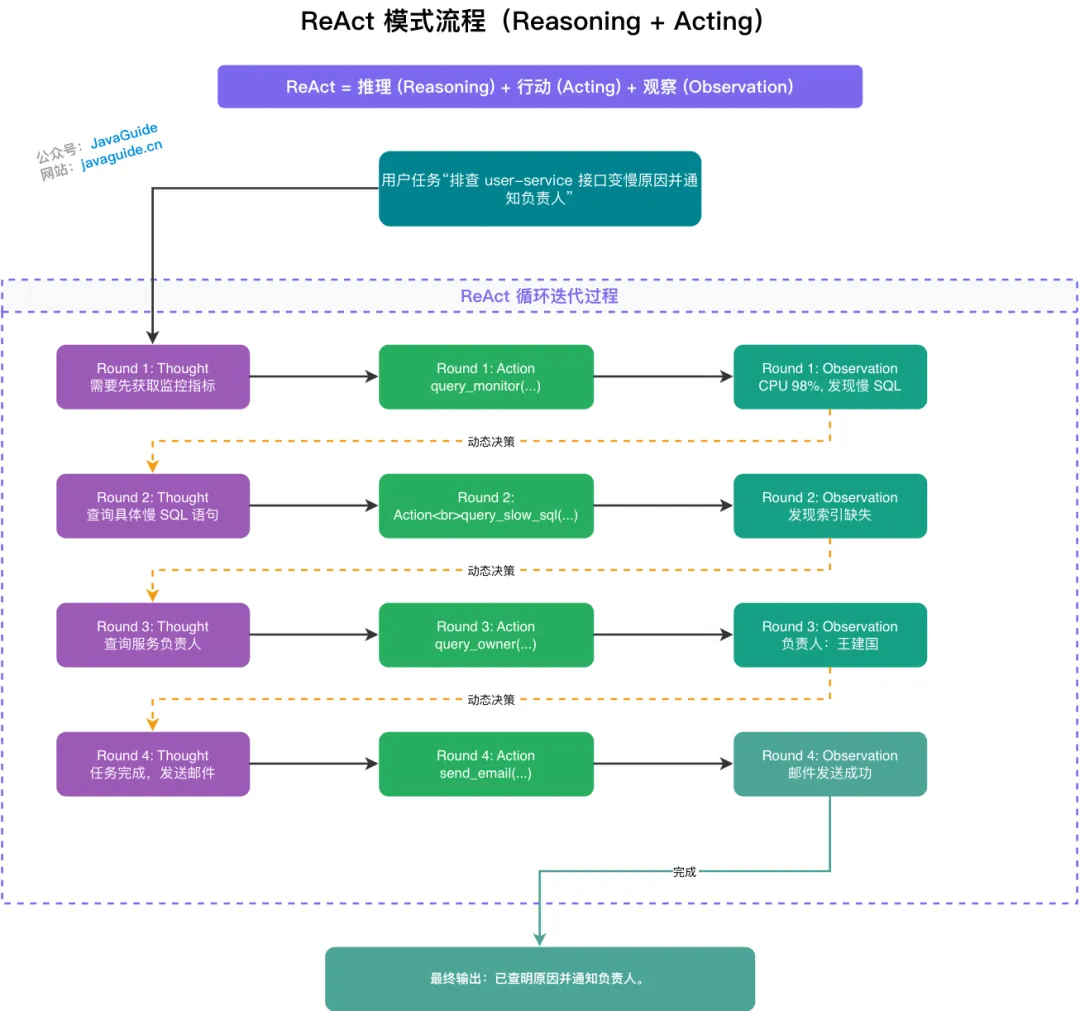
通俗来说:就是让 AI 在整体目标的指引下“走一步看一步”。它打破了一次性规划全部流程的局限,通过动态的交替循环边思考边验证。例如在排查线上服务变慢的故障时(后文会举例详细介绍),AI 不会死板地执行预设脚本,而是先查询监控指标,观察到 CPU 飙升及慢 SQL 告警后,再动态决定去深挖数据库日志定位全表扫描问题,最后基于真实的排查结果通知负责人。这种顺藤摸瓜的过程,生成了更可靠、可追踪且能动态纠错的任务解决轨迹。
🔄 ReAct的工作流程
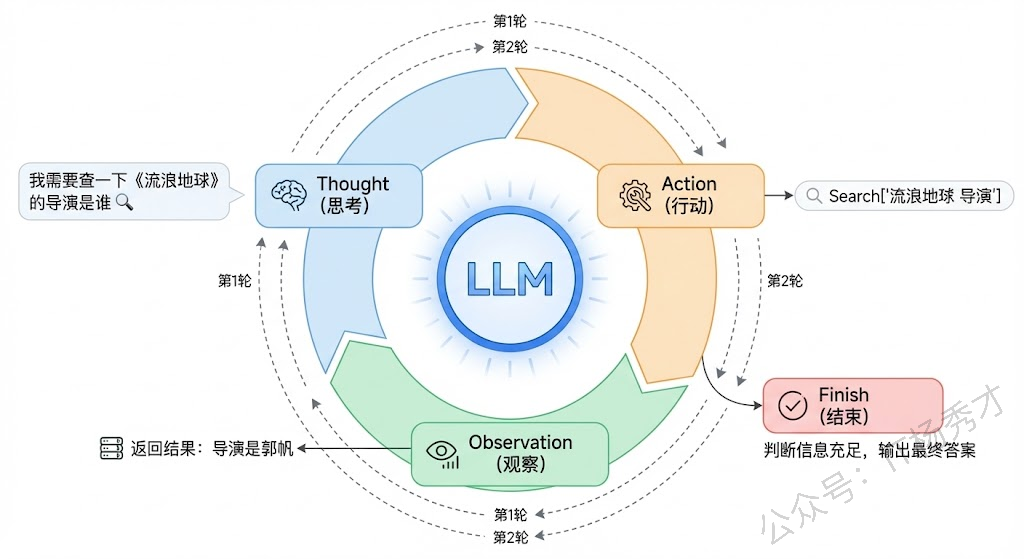
ReAct的工作流程可以用一个循环来概括:Thought → Action → Observation → Thought → Action → Observation → … → Finish
我们用一个具体例子来说明。假设用户问:"《流浪地球》的导演还执导过哪些电影?这些电影中评分最高的是哪一部?"
第一轮:
- Thought(思考):我需要先查一下《流浪地球》的导演是谁。
- Action(行动):调用搜索工具,搜索"流浪地球 导演"。
- Observation(观察):搜索结果返回——导演是郭帆。
第二轮:
- Thought(思考):好的,导演是郭帆。接下来我需要查一下郭帆还导演过哪些电影。
- Action(行动):调用搜索工具,搜索"郭帆 导演 电影作品"。
- Observation(观察):郭帆导演的电影有《流浪地球》《流浪地球2》《同桌的你》《李献计历险记》等。
第三轮:
- Thought(思考):现在我知道了他的作品列表,接下来需要比较这些电影的评分,找出最高的。
- Action(行动):调用搜索工具,搜索这些电影的评分信息。
- Observation(观察):返回评分数据。
第四轮:
- Thought(思考):根据评分数据,《流浪地球2》评分最高。我现在可以给出最终答案了。
- Action(行动):Finish,输出最终答案。
这就是ReAct的精髓——推理指导行动,行动反馈推理,二者交替螺旋式推进,直到任务完成。
🎭 Thought、Action、Observation各自的角色
在ReAct的三元组中,每个部分承担着不同的职责:
-
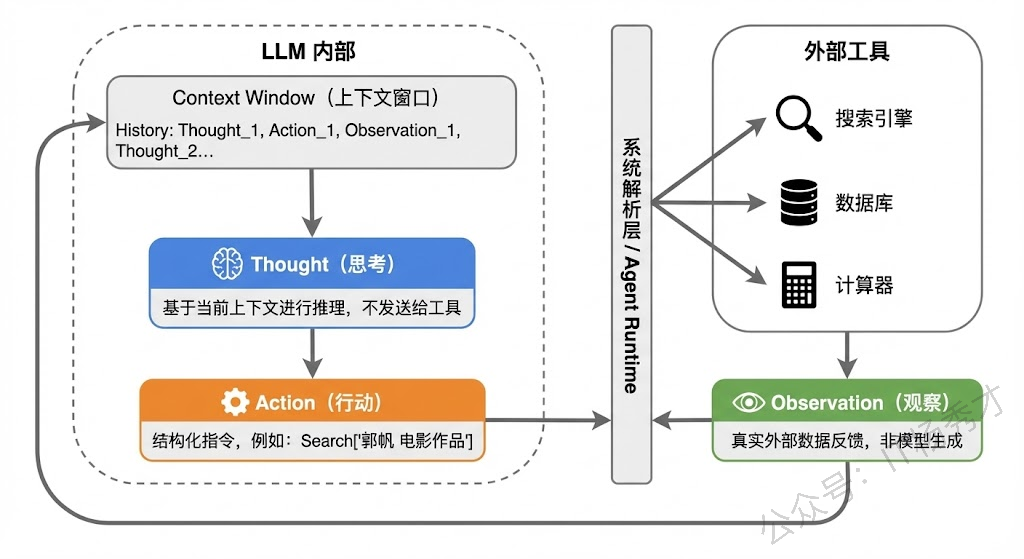
Thought 是模型的"内心独白",它不会被发送给外部工具,而是留在推理链中供模型自己参考。Thought负责分解任务、分析当前进度、决定下一步策略。可以说Thought就是CoT思维链在ReAct中的体现,它让模型的决策过程变得可解释、可追溯。
-
Action 是模型与外部世界交互的桥梁。Action通常是对某个外部工具的调用,比如搜索引擎、计算器、数据库查询、API调用等。Action的关键在于它是结构化的,通常包含工具名称和调用参数,这样系统才能解析并执行。
-
Observation 是外部环境给模型的反馈,也就是Action执行后返回的结果。Observation不是模型生成的,而是真实的外部数据,这就保证了模型的推理过程是"接地气"的,基于真实信息而非臆想。
这三者的协同关系,本质上构成了一个闭环反馈系统:Thought基于当前上下文做出判断,Action将判断转化为具体操作,Observation将操作结果反馈回来更新上下文,然后新一轮的Thought再基于更新后的上下文继续推理。
💻 ReAct与Prompt工程的关系
在实际实现中,ReAct的核心机制是通过精心设计的Prompt来驱动的。一个典型的ReAct Prompt模板大致包含以下几个部分:
|
|
通过这种Prompt模板,我们实际上是在用few-shot或instruction的方式"教会"大模型按照Thought-Action-Observation的固定格式来输出。模型生成到Action时,系统会截断模型输出、解析Action内容、调用相应工具、获取结果,然后将Observation拼接回上下文,再让模型继续生成下一轮的Thought。
这也是为什么说ReAct是一个框架而非一个模型——它是一种组织大模型推理和行动的协议和流程,可以套用在任何足够强的大模型上。
🔧 ReAct的落地实现
ReAct 的落地实现主要依赖以下五个核心组件协同工作:
- 历史上下文(History):Agent 维护一个统一的交互日志,涵盖以往的推理步骤、执行动作以及反馈观察。这为 LLM 提供了即时"记忆"机制,确保决策时能回顾先前事件,从而规避冗余步骤或无限循环风险。
- 实时环境输入(Real-time Environment Input):包括 Agent 当前捕获的外部变量,如系统警报信号或用户即时反馈。这些补充数据融入上下文,帮助 LLM 准确评估现状并调整策略。
- 模型推理模块(LLM Reasoning Module):作为 ReAct 的核心引擎,处理逻辑分析与规划。每次迭代中,LLM 整合历史记录、环境输入及任务目标,输出行动方案。
- 执行工具集与技能库(Tools & Skills):充当 Agent 的操作接口,与外部实体互动。其中原子工具(Tools)处理单一操作(如数据库查询、邮件发送);技能(Skills)则是对多个相关工具的编排封装,提供面向特定业务场景的可复用能力模块(如"故障诊断技能"、“竞品分析技能”)。两者共同构成 Agent 的行动能力边界。
- 反馈观察机制(Feedback Observation):行动完成后,从环境中采集的实际响应,包括成功输出、错误提示或无结果状态。这一信息将被追加至历史上下文中,成为后续推理的可靠基础。
这里展示一下执行流程(采用逐轮叙述形式,便于追踪动态变化)
- Round 1
- 历史上下文:空
- 实时环境输入:空
- 核心 Prompt:已知:当前历史上下文:{历史上下文} 实时环境输入:{实时环境输入} 用户目标:“排查 user-service 变慢原因并通知负责人” 请做出下一步的决策,你必须最少使用一个工具来实现该决策。
- 执行工具:query_monitor 查询 user-service 早上的监控指标
- 观察结果:CPU 飙升至 98%,伴随大量慢 SQL 告警。
- Round 2
- 历史上下文:已获取监控指标(CPU 飙升,有慢 SQL)
- 执行工具:query_slow_sql 查询慢 SQL 日志
- 观察结果:发现语句未命中索引,导致全表扫描。
- Round 3
- 历史上下文:监控指标 + 日志结论(全表扫描)
- 执行工具:query_owner 查询 user-service 负责人
- 观察结果:负责人为王建国,邮箱 wangjianguo@company.com。
- Round 4
- 历史上下文:监控指标 + 日志结论 + 负责人信息
- 执行工具:send_email 向负责人发送排查报告
- 观察结果:邮件发送成功。 从底层来看,驱动 Agent Loop 运转的核心是一套动态组装的 Prompt:
|
|
⚖️ ReAct的优势和局限
ReAct的优势主要体现在三个方面:
- 可解释性强:每一步行动之前都有明确的推理过程,出了问题可以回溯到具体是哪一步的思考出了偏差;
- 减少幻觉:通过调用外部工具获取真实数据,而不是让模型凭空编造,大大提高了事实准确性;
- 泛化能力好:同一套ReAct框架可以对接不同的工具集,适用于问答、数据分析、代码生成等多种场景。
但ReAct也有明显的局限性:
- 效率问题:每一轮Thought-Action-Observation都需要一次LLM调用加一次工具调用,对于简单任务来说开销过大;
- 错误累积:如果中间某一步的推理或工具调用出错,后续步骤可能会在错误的基础上越走越偏;
- 对模型能力的依赖:ReAct需要模型有较强的指令遵循能力和格式控制能力,弱模型很容易输出不符合格式要求的内容导致解析失败。
🔮 ReAct在现代Agent框架中的演进
现在主流的Agent框架基本都是在ReAct的基础上做了增强和扩展。
比如LangChain中的AgentExecutor就是ReAct的典型实现,它的Agent循环本质就是不断地让LLM生成Thought和Action,然后执行工具获取Observation,直到LLM输出Final Answer。
更新的框架像LangGraph,它把ReAct的线性循环扩展成了图结构,允许更复杂的分支和条件跳转,但底层的Thought-Action-Observation三元组逻辑依然没变。
另外还有一些变体值得关注:
- Reflexion在ReAct的基础上加入了自我反思机制,当任务失败时模型会回顾整个推理过程并总结经验教训,下次再遇到类似问题时可以避免犯同样的错误
- Plan-and-Execute则是先做全局规划再分步执行,适合更长链路的复杂任务
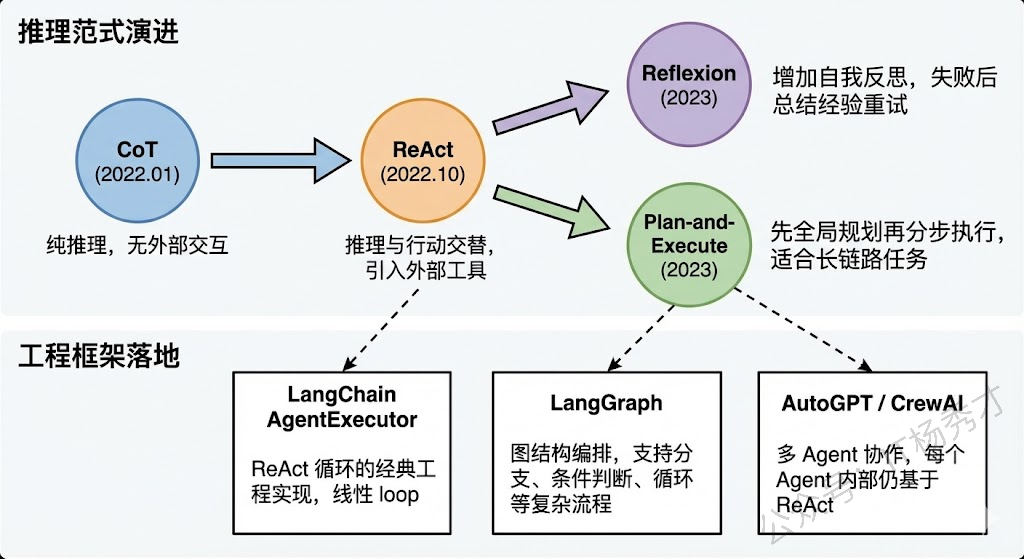
从关系上看,ReAct不是CoT、ToT的替代品,而更像是一个运行框架。它内部的"Thought"完全可以使用CoT风格来展开,因此可以把它理解成:CoT负责怎么想,ReAct负责怎么把想和做串起来。
📋 Plan-and-Execute(规划-执行分离)
这是一种偏工程实践的策略。它的核心思路是把规划和执行拆成两个独立阶段:先让一个"Planner LLM"对任务做全局规划,输出一个完整的步骤清单,然后让一个"Executor LLM"逐步执行每个步骤。
- 优势:是规划阶段可以纵览全局,不会被执行过程中的细节干扰,适合那些步骤较多但逻辑相对确定的长期复杂任务,比如"帮我写一篇行业分析报告"这种。能有效避免 ReAct 模式在长任务中容易出现的"迷失"或"死循环"问题
- 劣势:偏向静态工作流,执行过程中的动态调整和容错能力较弱。如果环境变化(如工具失败),可能需要重新规划,导致效率低下。
| 维度 | ReAct | Plan-and-Execute |
|---|---|---|
| 规划方式 | 动态、逐步规划 | 静态、全局预规划 |
| 适用场景 | 动态环境、需实时纠偏 | 步骤明确的长期复杂任务 |
| 容错能力 | 强(每步可动态修正) | 弱(环境变化需重新规划) |
| 上下文管理 | 随迭代持续增长 | 执行步骤相对独立,更可控 |
最佳实践:两者并非互斥,可结合使用——规划阶段采用 CoT 生成全局步骤,执行阶段在每个步骤内嵌入 ReAct 子循环,兼顾全局结构性和局部灵活性。在执行层,还可以为每类子任务预注册对应的 Skill,让规划出的每一个步骤都能高效映射到可复用的能力模块上,进一步提升执行效率。
🔁 Reflexion(反思机制)
则是在规划执行的基础上加入了"复盘"环节。当Agent执行一个任务失败后,它不会简单地重试,而是先回顾整个推理和执行过程,总结出"哪里做错了、下次应该怎么改进"的经验教训,然后把这些反思存入记忆,在下一次尝试中参考。Reflexion本质上赋予了Agent从失败中学习的能力,类似于人类的"吃一堑长一智"。
Reflection(反思)模式赋予 Agent 自我纠错与迭代优化的能力,核心理念是:通过自然语言形式的口头反馈强化模型行为,而非调整模型权重(即零训练成本)。
三大主流实现方案
- Reflexion 框架(Noah Shinn et al., 2023):Agent 在任务失败后进行口头反思,将反思结论存入情节记忆缓冲区,供下次尝试时参考。例:代码调试中,上次失败后反思"变量 count 在调用前未初始化",下次直接规避同类错误。
- Self-Refine 方法:任务完成后,Agent 对自身输出进行批判性审查并迭代改进,平均可提升约 20% 的输出质量。流程:生成初稿 → 自我批评(“内容不够具体”)→ 修订输出 → 循环至满足质量标准。
- CRITIC 方法:引入外部工具(搜索引擎、代码执行器等)对输出进行事实性验证,再基于验证结果自我修正,相比纯内部反思更具客观性。
Reflection 通常不单独使用,而是作为增强层叠加在 ReAct 或 Plan-and-Execute 之上:ReAct + Reflection 使每轮观察后不仅更新行动计划,还进行显式自我反思,形成自适应 Agent。实际应用中显著提升了 Agent 在不确定环境下的鲁棒性,但会带来额外的 LLM 调用开销。
🤖 LLM+P(LLM + 经典规划器)
是一种混合方法,它把LLM的自然语言理解能力和经典AI规划算法(如PDDL规划器)的严格推理能力结合在一起。LLM负责把用户的自然语言需求转化为结构化的规划问题描述(PDDL格式),然后交给经典规划器去求解最优行动序列,最后LLM再把结果翻译成自然语言返回给用户。这种方法在需要严格逻辑保证的场景(比如机器人路径规划)中有独特优势。

⚖️ 工程选型的思考
在实际 Agent 开发中,不同方法并不存在绝对的优劣,关键在于任务类型、延迟预算、可解释性要求和工程复杂度。
- 如果只是大多数常见任务,CoT + ReAct 往往已经足够好用。它简单、直观、延迟较低,也是目前很多通用 Agent 的默认起点。
- 如果任务本身具有明显的多路径探索特征,例如需要试错、搜索、回退,那么 ToT 会比单链式 CoT 更有优势,因为它能够显式探索多个候选方向。
- 如果任务需要“先发散分析、再聚合结论”,例如多文档总结、多源信息融合,那么 GoT 的聚合思想会更有启发意义。尽管目前落地还不如 CoT 和 ReAct 普遍,但它代表了一种更强的推理表达能力。
- 如果任务链条较长、步骤稳定、流程相对明确,那么 Plan-and-Execute 是一种非常实用的企业级方案。它把规划和执行拆开,便于分别优化、监控和调试。
- 如果系统需要在长期运行中持续修正自身行为,那么 Reflexion 会更有价值。它的重点不是一次成功,而是越做越好。
- 如果业务场景对逻辑正确性和约束满足有极高要求,那么 LLM + P 是值得优先考虑的路线,因为它能够借助经典规划器提供更强的形式化保证。
一个非常实用的经验原则是:
先用最简单的方法跑通,再围绕瓶颈做针对性升级。
因为复杂方法带来的不仅是推理能力提升,也一定伴随着额外成本:更高的时延、更大的 token 开销、更复杂的调试过程,以及更高的系统维护门槛。
🤝 多智能体系统
🔍 单Agent的瓶颈
要理解多智能体系统,最好的切入点是先搞清楚:单个Agent到底在什么时候不够用了?
回顾单Agent的架构——一个LLM作为中枢大脑,配上工具、记忆、规划能力,通过ReAct等框架来完成任务。这套架构在很多场景下确实好用,但随着任务复杂度的提升,它会遇到几个瓶颈。
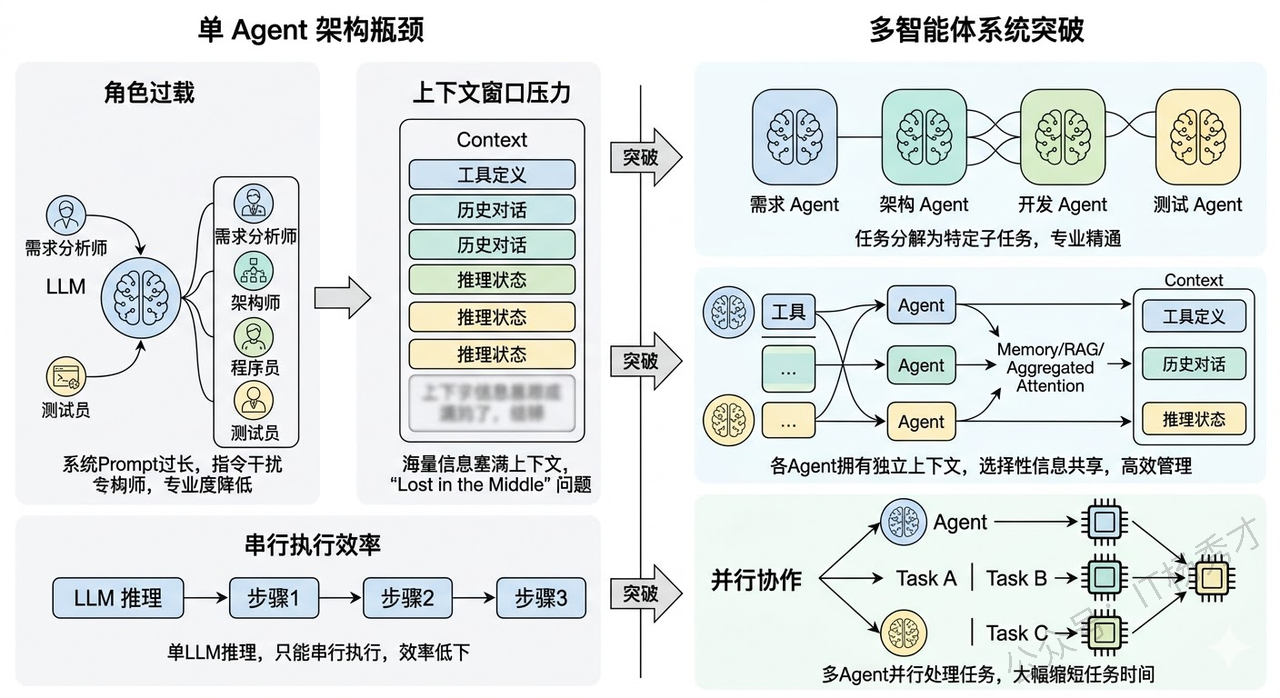
-
第一个瓶颈是角色过载。 当你让一个Agent同时扮演"需求分析师 + 架构师 + 程序员 + 测试员"时,它的System Prompt会变得又长又复杂,各种角色的指令互相干扰,模型很难在一个上下文里同时保持多种角色的专业能力。就像现实中一个人同时做四份工作,每份都做不精。
-
第二个瓶颈是上下文窗口的压力。 一个复杂任务涉及大量的工具定义、历史对话、中间推理状态,全部塞进一个Agent的上下文窗口,很快就撑满了。即使窗口够大,信息太多也会导致"Lost in the Middle"问题,关键信息被淹没。
-
第三个瓶颈是串行执行的效率问题。 单Agent只有一个LLM在推理,所有步骤只能串行执行。如果任务中有可以并行的部分(比如同时分析三个竞品),单Agent也只能一个一个来。
多智能体系统就是为了突破这些瓶颈而出现的。
🏛️ 什么是多智能体系统
多智能体系统(Multi-Agent System,MAS)是指多个具有不同角色、专长或职责的Agent组成一个协作网络,通过互相通信和配合来共同完成一个复杂任务。
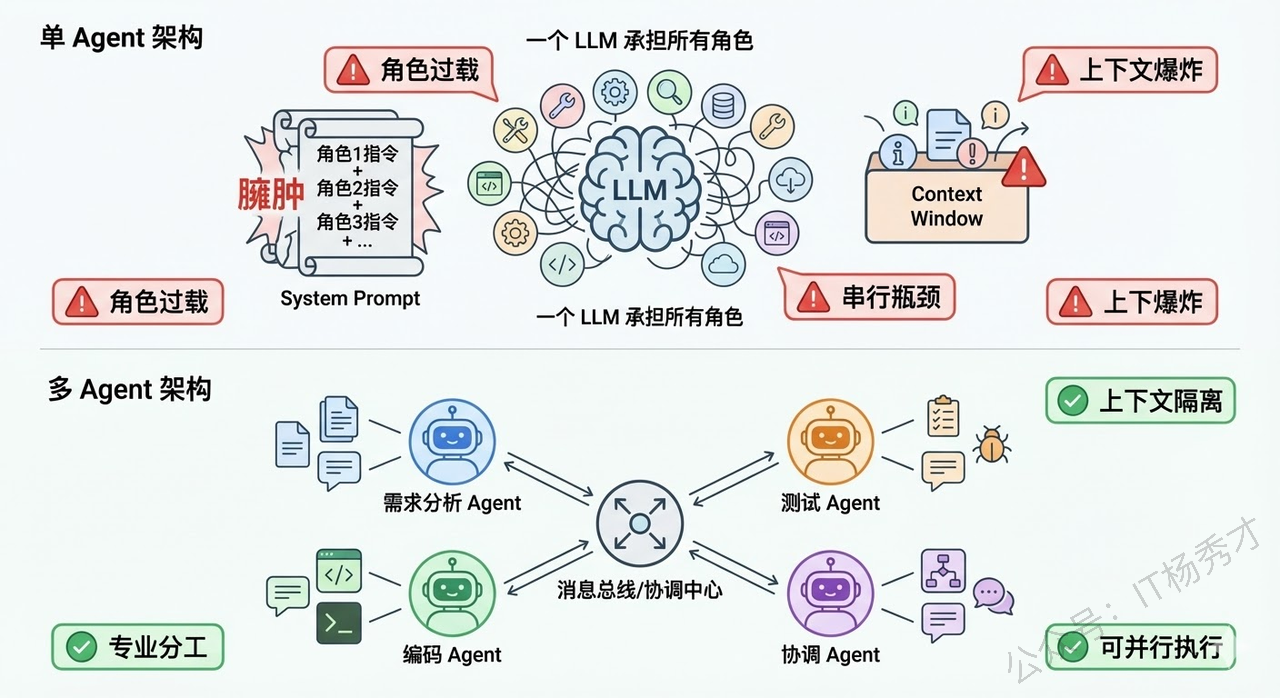
你可以把它类比为一个公司的团队协作。单Agent就像一个全栈的"独行侠",什么都自己干。而多智能体系统就像一个有明确分工的项目团队——有产品经理负责理解需求、架构师负责设计方案、程序员负责写代码、测试负责验证质量,每个人都专注于自己最擅长的领域,通过沟通协作来完成整个项目。
在技术实现层面,多智能体系统的每个Agent本质上是LLM驱动的,但每个Agent有自己独立的System Prompt(定义角色和职责)、工具集(只挂载与自己职责相关的工具)、以及记忆空间(可以有私有记忆也可以共享部分记忆)。Agent之间通过某种通信机制(消息传递、共享黑板、管道等)来交换信息和协调行动。
✨ 多Agent协作的核心优势
理解了"为什么需要多Agent"之后,优势就很自然了:
-
专业化分工带来的质量提升是最大的优势。每个Agent只负责一个明确的角色,它的System Prompt可以写得非常精确和专注,挂载的工具也只需要和它的职责相关。这样LLM在推理时的"认知负荷"大幅降低,做出高质量决策的概率明显提高。就像你不会让一个前端工程师去写数据库优化SQL一样,专业的事交给专业的Agent。实验也验证了这一点——在代码生成任务中,让一个Agent同时写代码和审核代码的效果,明显不如让一个"Coder Agent"写代码然后让一个独立的"Reviewer Agent"做代码审查。因为后者在审查时不会带有"这是我自己写的代码"的认知偏见。
-
上下文隔离带来的效率提升也非常显著。每个Agent只需要在自己的上下文中保留与自身职责相关的信息,不需要装载其他Agent的工具定义和历史记录。这不仅降低了单个Agent的token消耗,也避免了信息过多导致的注意力分散。
-
并行执行带来的速度提升在很多场景下都很有价值。多个Agent可以同时处理任务的不同部分——比如在一个数据分析场景中,一个Agent在查询销售数据的同时,另一个Agent可以去查询用户反馈数据,最后由一个汇总Agent把两边的结果合并分析。这比单Agent串行执行两次查询要快得多。
-
容错和鲁棒性也得到了改善。多个Agent可以互相检查和验证对方的输出——一个Agent写了代码,另一个Agent来测试;一个Agent做了分析,另一个Agent来验证逻辑是否自洽。这种"交叉检验"的机制在单Agent架构中很难实现。
🔀 主流的多Agent协作模式
在实际工程中,多Agent之间的协作方式不是随意的,而是有几种成熟的模式。理解这些模式对于实际项目设计都很重要。
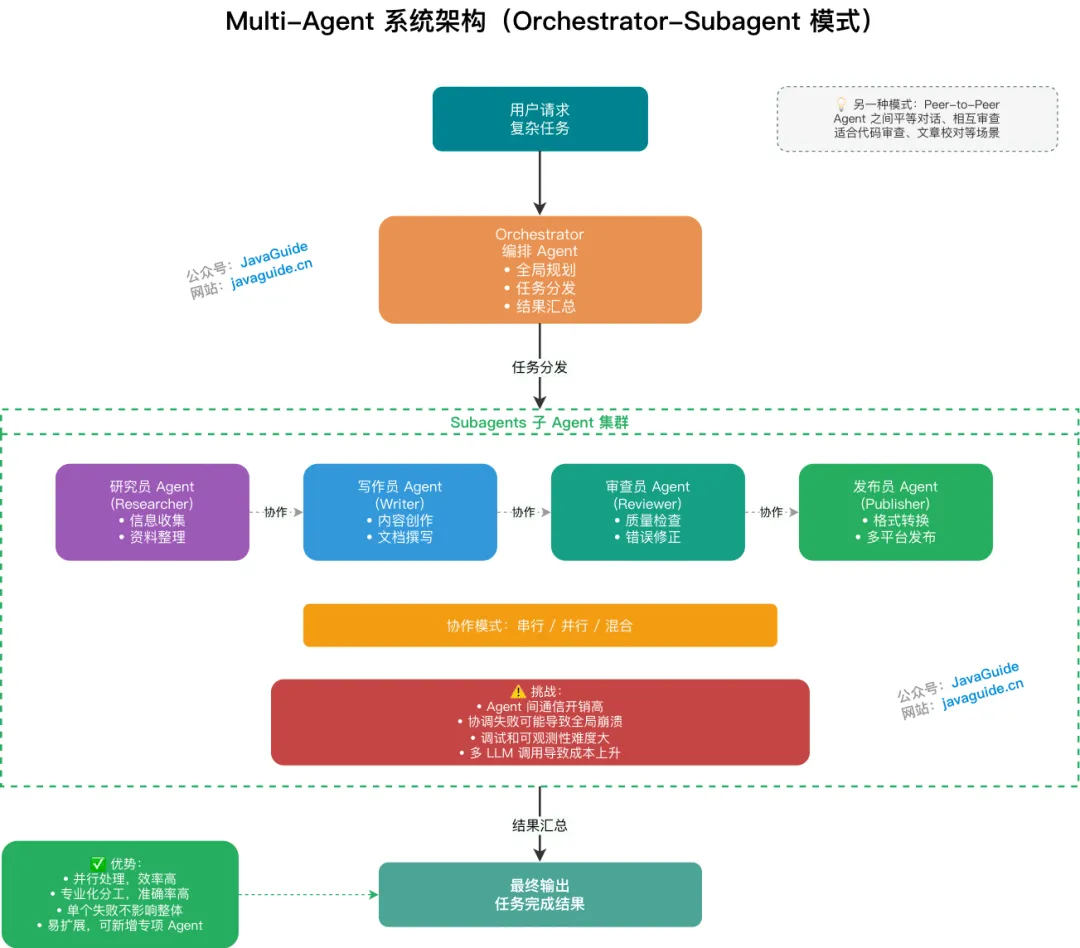
-
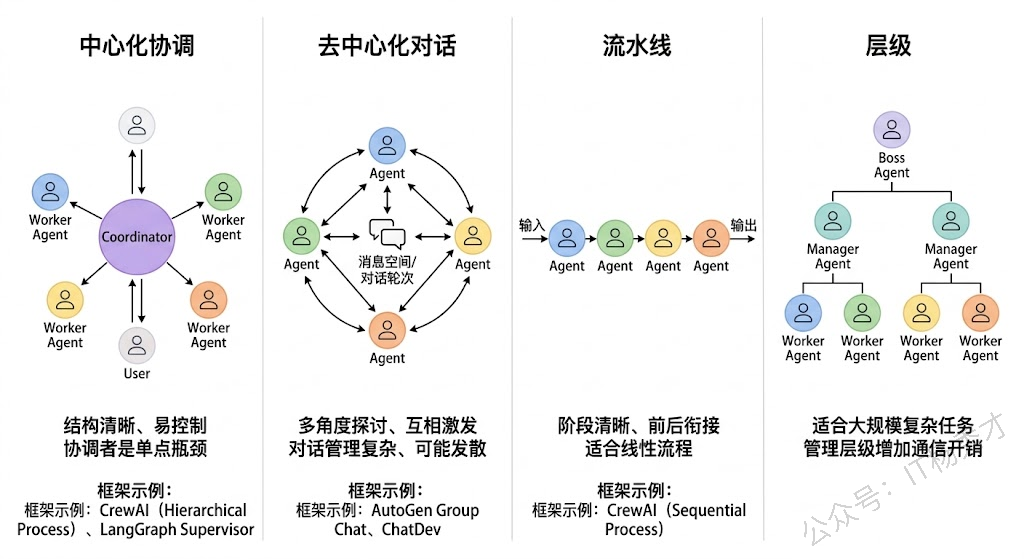
中心化协调模式(Orchestrator Pattern) 是最常见的模式。有一个"协调Agent"(也叫Supervisor / Manager)作为中枢,它负责接收用户任务、分配子任务给各个专业Agent、收集结果、做最终汇总。其他Agent不直接互相通信,而是都和协调Agent交互。这种模式结构清晰、容易控制,但协调Agent是单点瓶颈——如果它的判断出错,整个团队都会被带偏。
-
去中心化对话模式(Debate / Discussion Pattern) 允许多个Agent之间直接对话讨论。比如让一个"正方Agent"和一个"反方Agent"围绕一个问题展开辩论,最后由一个"裁判Agent"做总结。这种模式在需要多角度分析的场景中很有效,但对话管理更复杂。
-
流水线模式(Pipeline Pattern) 是把任务拆成多个阶段,每个阶段由一个Agent负责,上一个Agent的输出是下一个Agent的输入,形成一条流水线。比如"需求分析Agent → 设计Agent → 编码Agent → 测试Agent",就是一条典型的软件开发流水线。这种模式适合阶段明确、前后依赖关系清晰的任务。
-
层级模式(Hierarchical Pattern) 是中心化模式的扩展。顶层有一个总协调Agent,它把任务分配给几个中层Manager Agent,每个Manager再管理自己下属的Worker Agent。这种模式适合规模更大、层次更深的复杂任务。
A2A (Agent-to-Agent) 通信协议
当我们把单个 Agent 升级为 Multi-Agent(多智能体团队)时,必然面临一个工程难题:Agent 之间怎么沟通? 如果在智能体之间依然使用自然语言(就像人类和 ChatGPT 聊天那样)进行交互,会导致极高的 Token 消耗,且极易在关键参数传递时出现格式解析错误(即模型幻觉导致的数据丢失)。A2A 协议就是为了解决这一痛点而生的。
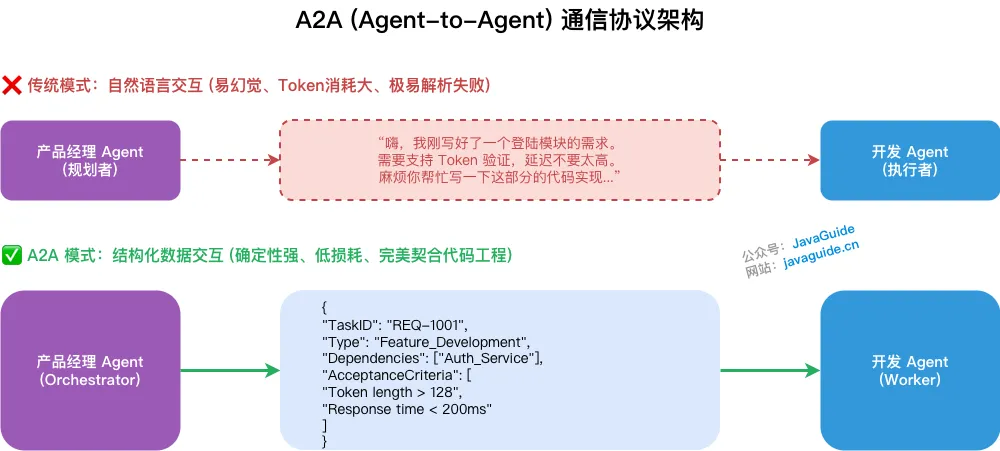
核心思想: A2A 协议是专门为 AI 智能体间高效、确定性协作而设计的通信规范。它要求 Agent 在相互交互时,收起“高情商”的自然语言废话,转而使用高度结构化、带有严格校验规则的数据载体(如定义了 Schema 的 JSON、XML 或特定的状态流转指令)。
通俗理解: 这就好比后端开发中的微服务架构。如果两个微服务通过互相解析带有感情色彩的 HTML 页面来交换数据,系统早就崩溃了;真实的微服务是通过 RESTful 或 RPC 接口,传递结构化的实体对象。A2A 协议就相当于给大模型之间定义了接口契约。 比如,“产品经理 Agent”写完了需求,它不会对“开发 Agent”说:“嗨,我写好了一个登陆模块,请你开发一下。” 而是通过 A2A 协议输出一段标准化的 JSON Payload,里面明确包含 TaskID、Dependencies、AcceptanceCriteria 等字段。开发 Agent 接收后,直接反序列化成内部上下文开始写代码。
Agentic Workflows(智能体工作流)
这是由吴恩达(Andrew Ng)在近期重点倡导的宏观概念,它实际上是对上述所有范式的终极整合。

核心思想:不要仅仅把 LLM 当作一个“一次性回答生成器”,而是围绕它设计一套工作流。Agentic Workflows 涵盖了四大核心设计模式:
- Reflection(反思): 让模型检查自己的工作。
- Tool Use(工具使用): 为 LLM 配备网络搜索、代码执行等工具(即 ReAct 中的 Acting)。
- Planning(规划): 让模型提出多步计划并执行(即 Plan-and-Execute)。
- Multi-agent Collaboration(多智能体协作): 多个不同的 Agent 共同工作。
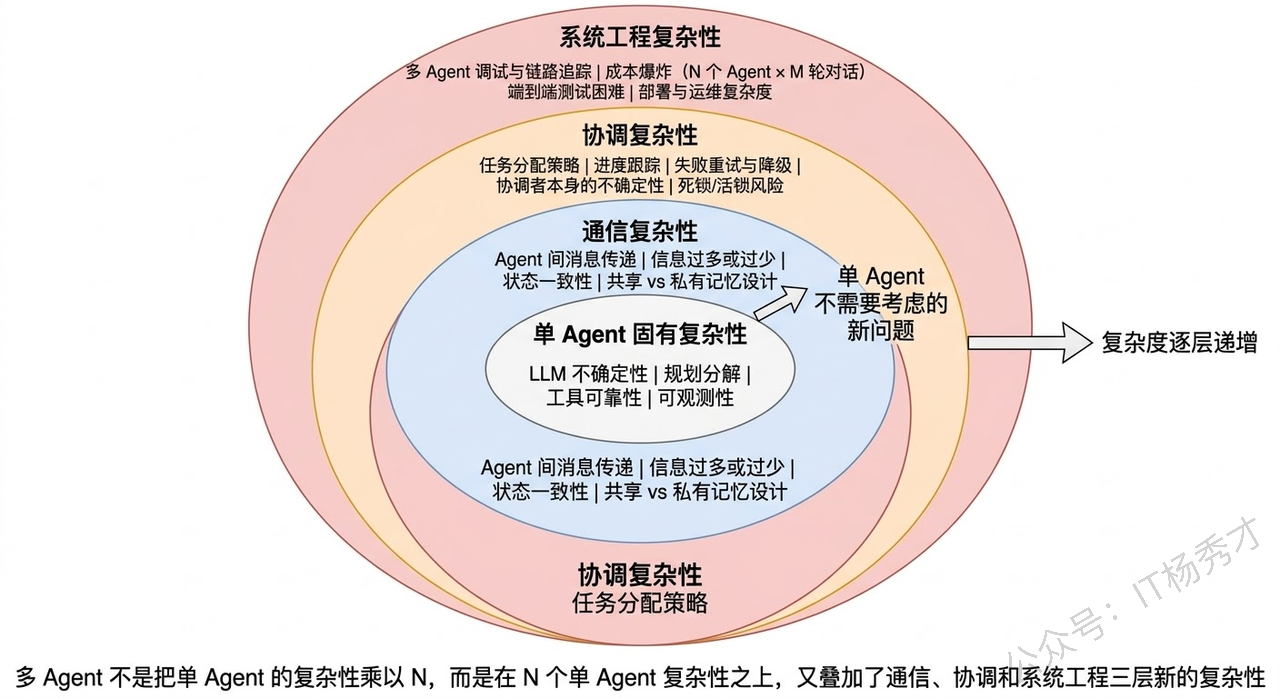
⚠️ 多Agent引入的新复杂性
多Agent不是银弹,它在解决单Agent瓶颈的同时,也引入了一系列单Agent时代完全不存在的新问题。
-
通信开销与信息一致性是第一个大问题。多个Agent之间需要互相传递信息,但传什么、传多少、什么时候传,都需要精心设计。传少了,下游Agent缺乏足够的上下文做出好的决策;传多了,又变成了变相把所有信息塞进一个超大上下文的老问题。更棘手的是信息一致性——Agent A在第3步更新了对任务的理解,但Agent B可能还在基于第1步的旧信息工作,这种信息不同步会导致协作混乱。 实际项目中,常见的做法是设计一个共享状态空间(Shared State)——所有Agent都可以读写的公共黑板。LangGraph中的State就是这个思路,每个Node(Agent)读取State中自己需要的字段、写回自己产出的结果,由图引擎保证状态的一致性。
-
任务分配与协调成本是第二个问题。谁来决定把哪个子任务分给哪个Agent?分完之后怎么知道各个Agent的执行进度?某个Agent失败了怎么重试或换人?这些在人类团队中靠项目经理和日会来解决的问题,在多Agent系统中需要靠一个可靠的"协调机制"来处理。而这个协调者本身也是一个LLM驱动的Agent,它的决策同样有不确定性——可能分配错任务、可能误判执行进度、可能做出不合理的重新规划。
-
调试难度的指数级增长是第三个问题,也是在实际项目中感知最强烈的痛点。单Agent的调试已经够难了——推理链长、不可复现、黑箱不透明。多Agent把这个难度又放大了一个量级:你需要追踪多个Agent之间的消息流、理解每个Agent独立的推理链、还要排查它们之间的交互是否正确。当一个多Agent系统给出了错误结果时,可能是Agent A的分析有误、也可能是Agent B在传递信息时丢了关键细节、也可能是协调Agent在汇总时做了错误的判断——定位问题的空间比单Agent大得多。
-
成本控制也是一个现实挑战。多Agent意味着多次LLM调用,而且Agent之间的通信本身也常常需要LLM来做"翻译"和"理解"。一个3个Agent的系统完成一次任务,总LLM调用次数可能是单Agent的3-5倍甚至更多。在token单价还没有降到足够低的阶段,这在很多B2C场景中是不可接受的成本。
🛠️ 主流框架和工程选型
了解了原理和挑战之后,如果能结合框架来谈就很有说服力了。
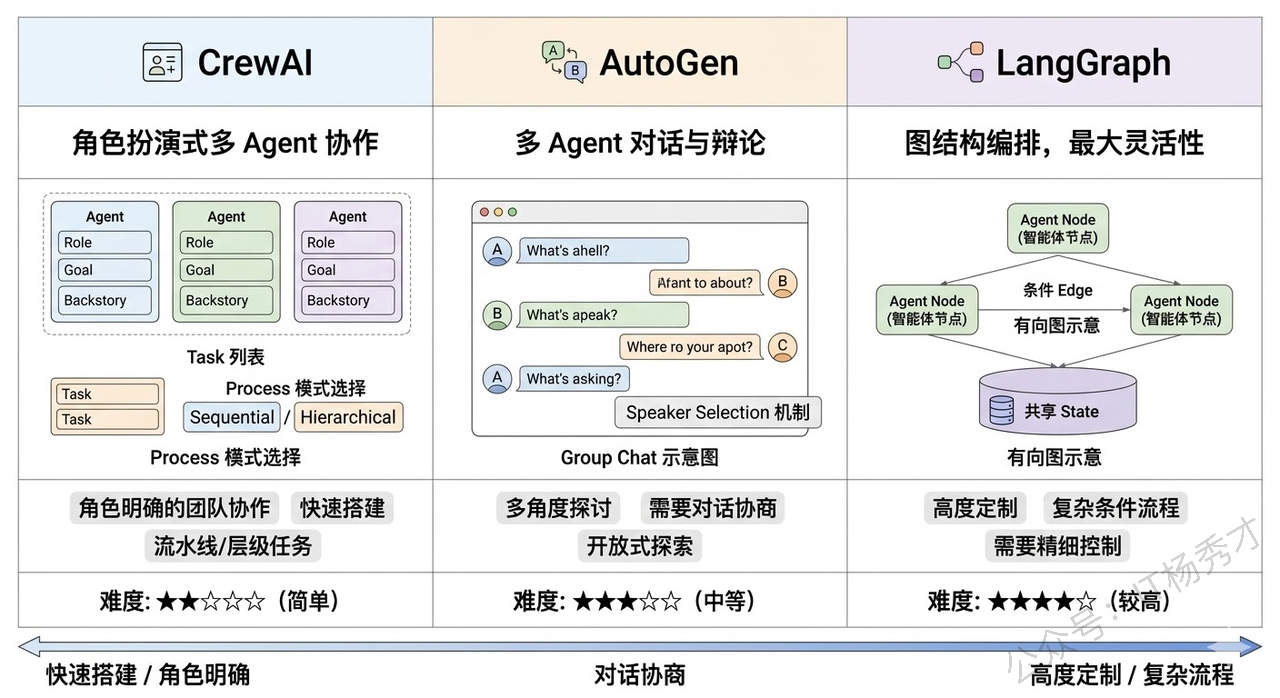
CrewAI 是目前最流行的多Agent框架之一,它用Role-Based的方式定义Agent——每个Agent有自己的Role(角色)、Goal(目标)、Backstory(背景故事),像定义一个角色扮演游戏的角色一样。支持Sequential(流水线)和Hierarchical(层级)两种协作模式,上手非常简单。
AutoGen(微软出品)侧重于多Agent对话场景,支持Group Chat模式让多个Agent在一个对话组里讨论问题,非常适合需要多角度探讨的场景。
LangGraph 虽然不是专门的多Agent框架,但它的图编排能力天然适合构建多Agent系统——每个Node可以是一个独立的Agent,Node之间的边定义了通信和数据流转,通过State做共享状态管理。它的灵活性最高,但上手门槛也最高。
选型原则:
- 如果任务可以分成几个明确的角色用流水线或层级方式协作,CrewAI是最快的选择
- 如果需要Agent之间自由讨论辩论,AutoGen更合适
- 如果需要高度定制的复杂协作流程,LangGraph给你最大的控制力
📝 总结
如果把 Agent 的规划与决策能力放在一个统一框架里看,可以得到一个比较清晰的结论:
- CoT、Self-Consistency、ToT、GoT 主要描述的是 LLM 的推理结构,解决“模型怎么想”的问题;
- ReAct、Plan-and-Execute、Reflexion、LLM + P 主要描述的是 Agent 的控制与执行方式,解决“系统怎么做”的问题。
前者偏向推理机制,后者偏向执行框架;前者回答“如何组织思维过程”,后者回答“如何组织任务过程”。两者并不是互斥关系,而是可以互相组合、上下协同。
例如,ReAct 中的 Thought 往往就可以采用 CoT 风格展开;Plan-and-Execute 中的 Planner 也完全可以借助 ToT 提升规划质量。换句话说,模型推理方法提供了 Agent 的“思考能力”,而 Agent 控制策略定义了这些能力如何被实际调度和执行。
从演进脉络来看,相关方法大致可以理解为两条并行路线:
| 类型 | 方法 | 核心特征 | 更适合的场景 |
|---|---|---|---|
| 模型推理方法 | CoT | 线性链式推理 | 简单多步问题 |
| 模型推理方法 | Self-Consistency | 多链投票,提升鲁棒性 | 数学/常识推理 |
| 模型推理方法 | ToT | 树状搜索,可回溯 | 复杂多路径任务 |
| 模型推理方法 | GoT | 图结构推理,可聚合 | 多源分析、先分后合 |
| Agent 控制策略 | ReAct | 推理与行动交替 | 工具调用、环境交互 |
| Agent 控制策略 | Plan-and-Execute | 规划执行分离 | 长链路稳定任务 |
| Agent 控制策略 | Reflexion | 基于反馈持续修正 | 长期运行、自我改进 |
| Agent 控制策略 | LLM + P | 结合经典规划器 | 强约束、强逻辑场景 |
归根结底,Agent 的规划能力并不是某一个单点技巧,而是一整套“如何让系统更会想,也更会做”的方法集合。理解这些方法之间的层级关系和适用边界,比单纯记住缩写本身更重要。